Бесщеточный двигатель принцип работы
Как устроен бесщеточный двигатель
Работа бесщеточного электродвигателя основывается на электрических приводах, создающих магнитное вращающееся поле.
В настоящее время существует несколько типов устройств, имеющих различные характеристики.
С развитием технологий и использованием новых материалов, отличающихся высокой коэрцитивной силой и достаточным уровнем магнитного насыщения, стало возможным получение сильного магнитного поля и, как следствие, вентильных конструкций нового вида, в которых отсутствует обмотка на роторных элементах или стартере.
Обширное распространение переключателей полупроводникового типа с высокой мощностью и приемлемой стоимостью ускорило создание подобных конструкций, облегчило исполнение и избавило от множества сложностей с коммутацией.
Использование
Бесщеточный двигатель постоянного тока с постоянными магнитами встречается в основном в устройствах с мощностью в пределах 5 кВт.
В более мощной аппаратуре их применение нерационально.
Магниты в двигателях данного типа отличаются особой чувствительностью к высоким температурам и сильным полям.
Двигатели активно используются в электрических мотоциклах, автомобильных приводах благодаря отсутствию трения в коллекторе.
Описание и принцип работы
Бесщеточный (бесколлекторный) двигатель постоянного тока очень похож на двигатель постоянного тока с постоянными магнитами, но не имеет щеток для замены или износа из-за искрения коммутатора.
Поэтому в роторе выделяется мало тепла, что увеличивает срок службы двигателей.
Конструкция бесщеточного двигателя устраняет необходимость в щетках благодаря более сложной схеме привода, в которой магнитное поле ротора является постоянным магнитом, который всегда синхронизирован с полем статора, что позволяет более точно контролировать скорость и крутящий момент.
Управление бесщеточными двигателями постоянного тока очень отличается от обычного щеточного двигателя постоянного тока тем, что этот тип двигателя включает в себя некоторые средства для определения углового положения роторов (или магнитных полюсов), необходимые для получения сигналов обратной связи, необходимых для управления переключением полупроводников. Появление процессорной техники и силовых транзисторов позволило конструкторам отказаться от узла механической коммутации и изменить роль ротора и статора в электромоторе постоянного тока.
Принцип работы БДКП
В бесколлекторном электродвигателе роль механического коммутатора выполняет электронный преобразователь. Это позволяет осуществить «вывернутая наизнанку» схема БДКП — его обмотки расположены на статоре, что исключает необходимость в коллекторе.
Иными словами, основное принципиальное различие между классическим двигателем и БДКП в том, что вместо стационарных магнитов и вращающихся катушек последний состоит из неподвижных обмоток и вращающихся магнитов. Несмотря на то что сама коммутация в нём происходит похожим образом, её физическая реализация в бесщёточных приводах гораздо более сложна.
Как работает коллекторная машина
Чтобы произвести запуск коллекторного двигателя, потребуется подать напряжение на обмотку возбуждения, которая расположена непосредственно на якоре. При этом образуется постоянное магнитное поле, которое взаимодействует с магнитами на статоре, в результате чего проворачиваются якорь и коллектор, закрепленный на нём. При этом подается питание на следующую обмотку, происходит повтор цикла.
Как осуществляется управление
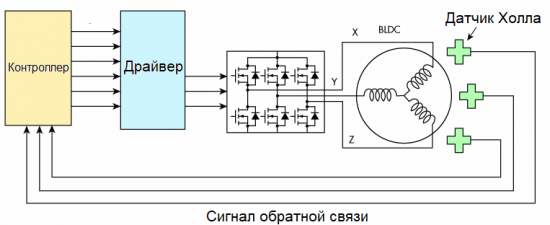
Электронный блок управления позволяет провести коммутацию обмоток привода. Для определения момента переключения при помощи драйвера отслеживается положение ротора по датчику Холла, установленном на приводе.
В том случае, если нет таких устройств, необходимо считывать обратное напряжение.
Оно генерируется в катушках статора, не подключенных на данный момент времени.
Контроллер — это аппаратно-программный комплекс, он позволяет отслеживать все изменения и максимально точно задавать порядок коммутации.
Трехфазные бесколлекторные электродвигатели
Очень много бесколлекторных электродвигателей для авиамоделей выполняется под питание постоянным током.
Но существуют и трехфазные экземпляры, в которых устанавливаются преобразователи.
Они позволяют из постоянного напряжения сделать трехфазные импульсы.
Работа происходит следующим образом:
- На катушку «А» поступают импульсы с положительным значением. На катушку «В» — с отрицательным значением. В результате этого якорь начнет двигаться. Датчики фиксируют смещение и подаётся сигнал на контроллер для осуществления следующей коммутации.
- Происходит отключение катушки «А», при этом импульс положительного значения поступает на обмотку «С». Коммутация обмотки «В» не претерпевает изменений.
- На катушку «С» попадается положительный импульс, а отрицательный поступает на «А».
- Затем вступает в работу пара «А» и «В». На них и подаются положительные отрицательные значения импульсов соответственно.
- Затем положительный импульс опять поступает на катушку «В», а отрицательный на «С».
- На последнем этапе происходит включение катушки «А», на которую поступает положительный импульс, и отрицательный идет к С.
И после этого происходит повтор всего цикла.
Преимущества использования
Изготовить своими руками бесколлекторный электродвигатель сложно, а реализовать микроконтроллерное управление практически невозможно. Поэтому лучше всего использовать готовые промышленные образцы.
Но обязательно учитывайте достоинства, которые получает привод при использовании бесколлекторных электродвигателей:
- Существенно больший ресурс, нежели у коллекторных машин.
- Высокий уровень КПД.
- Мощность выше, нежели у коллекторных моторов.
- Скорость вращения набирается намного быстрее.
- Во время работы не образуются искры, поэтому их можно использовать в условиях с высокой пожарной опасностью.
- Очень простая эксплуатация привода.
- При работе не нужно использовать дополнительные компоненты для охлаждения.
В чем разница между щеточными и бесщеточными двигателями?
Все чаще на просторах интернет-магазинов можно найти инструменты с двумя типами двигателей. Инструменты и садовая техника WORX также не отстают от современных трендов при производстве техники, так что на нашем сайте вы тоже можете найти специальную характеристику двигателя — щеточный или бесщеточный. Так что же это за характеристика, на что она влияет и в чем принципиальные отличия инструментов с тем или иным двигателем? Давайте разбираться.
Устройство и принцип действия щеточного двигателя
Щеточный двигатель по-другому еще называется коллекторным. Состоит двигатель из нескольких важных частей.
Ротор — по-другому, якорь. Как раз он вращается внутри и преобразует электрическую энергию в механическую. Якорь обмотан медной проволокой (обмоткой) с разных сторон ротора. За счет прохождения тока через проволоку создается магнитное поле, которое в свою очередь и создает вращение элемента.
На обмотке в бесщеточном двигателе установлен коммутатор, который используется для переключения с одной обмотки на другую, что позволяет менять направление вращения ротора. Этот коммутатор и есть коллектор, от которого взял свое название двигатель.
Чтобы напряжение передалось на обмотки, а ток прошел через коллектор в двигатель устанавливаются специальные щетки. Щетки обычно состоят из графита; они всегда контактируют с коммутатором и обеспечивают подачу энергии к катушкам с обмоткой. Есть две щетки, и каждая из них подключается к противоположному полюсу батареи. Это гарантирует, что при вращении ротора ток, протекающий к катушкам, постоянно меняет направление. Это приводит к необходимому изменению магнитного поля, которое позволяет ротору продолжать вращаться.
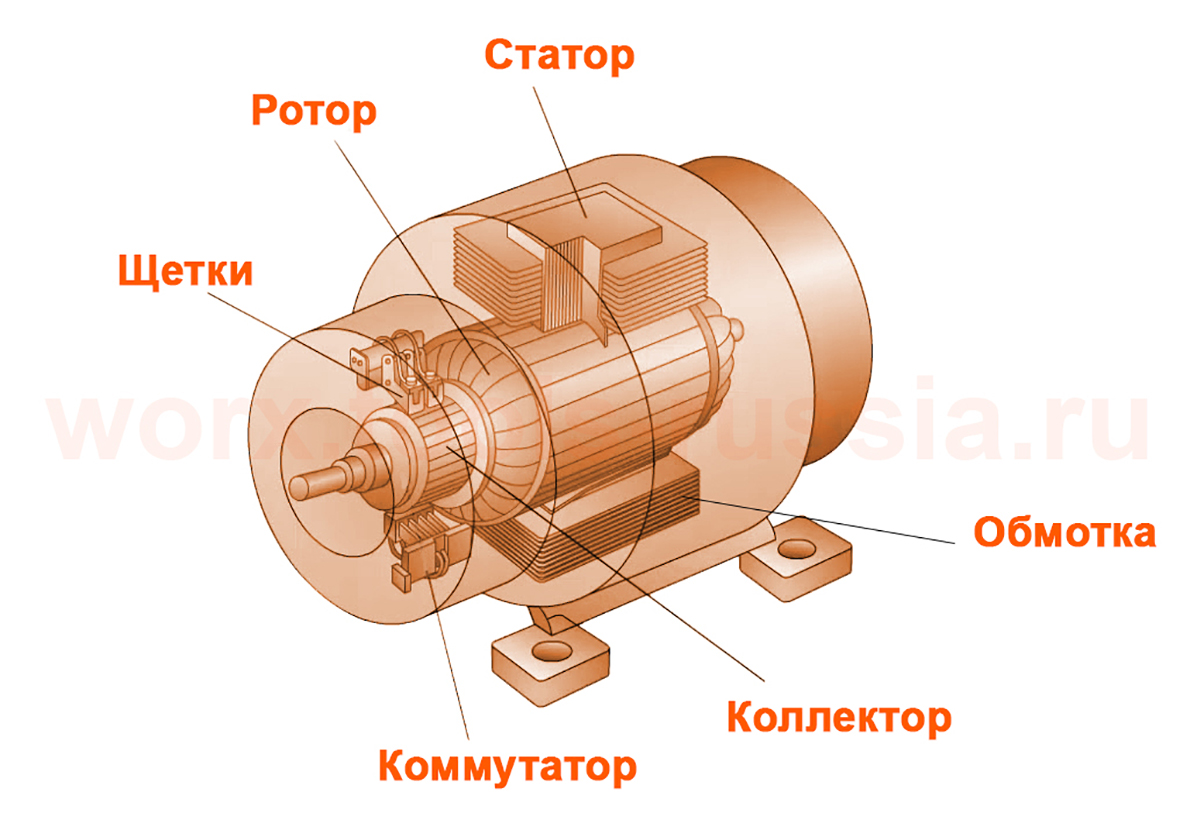
Все вышеописанные элементы установлены в статор. Статор — неподвижных элемент двигателя, в котором могут быть либо еще одна катушка с проволокой, либо постоянный магнит. За счет того или другого элемента и создается магнитное поле обратной полярности ротору, из-за чего тот вращается.
Коллекторные двигатели могут работать от переменного напряжения, так как при смене полярности ток в обмотках возбуждения и якоря также меняет направление, в результате чего вращательный момент не меняет своего направления.
Плюсы и минусы щеточного двигателя
Так мы с вами вкратце разобрались с устройством щеточного двигателя. Теперь в чем же его плюсы и минусы?
Плюсы
Минусы
Устройство и принцип действия бесщеточного двигателя
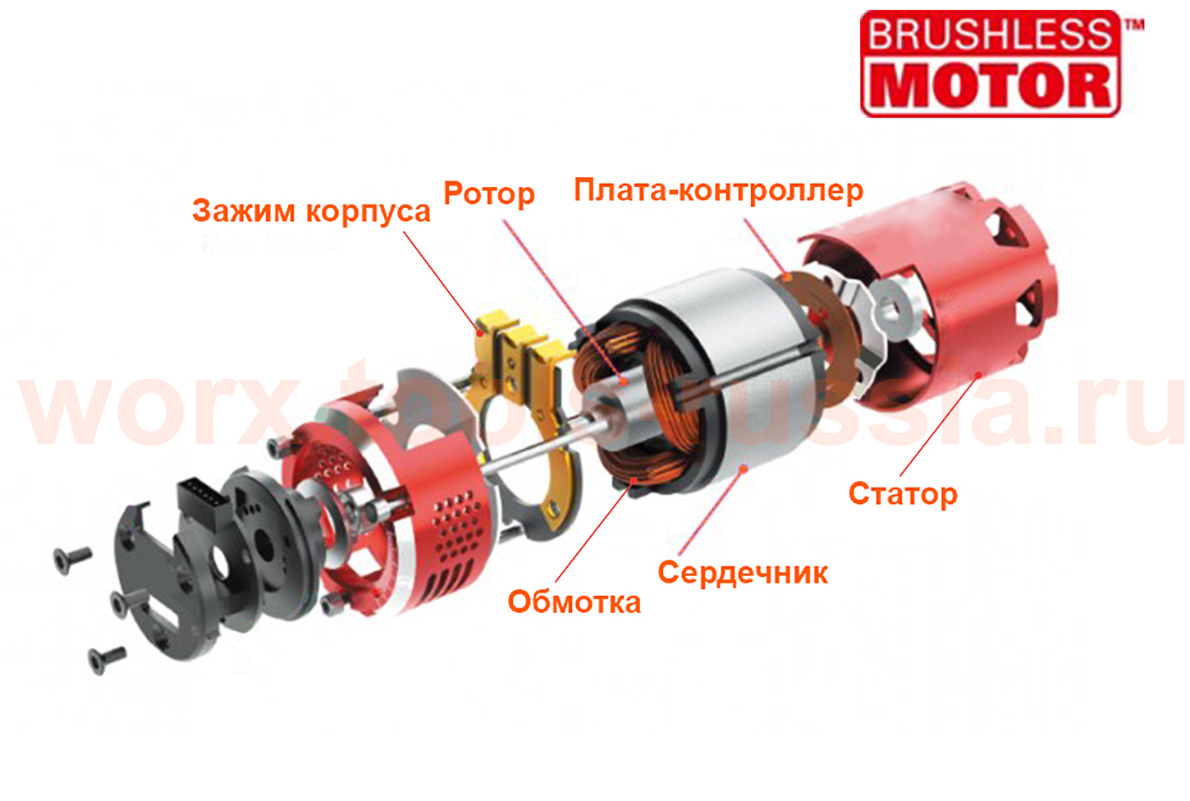
Теперь давайте разберем принцип работы бесщеточного двигателя. Как понятно из названия, его принципиальное отличие в отсутствии щеток. Но как же он тогда работает? Как нужная энергия поступает в двигатель?
В устройстве бесщеточного двигателя также присутствует ротор и статор — основные элементы любого мотора. Но при этом отсутствует коллектор, соответственно и двигатель по-другому называется бесколлекторным. Если у щеточного двигателя работа происходит за счет электро-механической смены полярности, то в бесщеточном двигателе все работает благодаря электромагнитной индукции. Также отличается местоположение обмотки — здесь она располагается на статоре, в отличие от предыдущего вида двигателя.
Вместо щеток и коллектора в бесщеточном двигателе установлены датчики Холла и контроллер, который контролирует подачу напряжения на катушки для создания индуктивности, а также положение ротора и скорость его вращения.
Когда плата подает на обмотку ток, создается тоже противоположное магнитное поле, и магниты на роторе начинают вращаться.
Еще одной особенностью бесщеточных двигателей нужно назвать их типы. Двигатели бывают двух типов — синхронный и асинхронный. В синхронном двигателе частота вращений ротора равна частоте вращений магнитного поля — то есть один оборот ротор совершает после одного полного прохождения тока через катушку. А в асинхронном двигателе обратная ситуация — частота вращений ротора меньше, чем частота вращения магнитного поля. То есть ток проходит через катушку быстрее.
Плюсы и минусы бесщеточного двигателя
Если с устройством бесщеточного двигателя мы разобрались, то теперь давайте рассмотрим положительные и отрицательные стороны инструментов с бесщеточными моторами.
Плюсы:
Минусы:

Но не бывает все настолько радужно. Даже у инструментов с бесщеточными двигателями есть и свои недостатки. Так сказать, ложка дегтя в бочке меда.
- К минусам, в первую очередь стоит отнести стоимость инструментов. Техника с бесщеточным мотором в цене дороже, чем упрощенные модели со щеточным двигателем.
- Вторым недостатком бесколлекторных инструментов может быть сложное и дорогое техническое обслуживание. Бесщеточный двигатель — технологичное устройство, для работы с которым нужны знания в микроэлектронике. К счастью, в сотрудники наших сервисных центров знают и умеют обслуживать бесколлекторные двигатели.
Итоги сравнения щеточного и бесщеточного двигателей
Если сравнивать инструменты с разными видами двигателей, то можно смело сказать, что техника с бесщеточным двигателем надежнее и мощнее. Но нужно учитывать тот факт, что ориентирована такая техника больше на профессиональные работы. В быту же и инструменты со щеточным двигателем отлично справятся со своими задачами. Потому перед покупкой инструмента заранее определите цели, для которых вы будете использовать инструменты.
В ассортименте компании WORX есть инструменты и со щеточными и с бесщеточными двигателями. Чтобы определить какой именно тип двигателя установлен в инструменте, обратите внимание на иллюстрацию в карточке товара — в бесщеточных моделях есть специальная пометка «BRUSHLESS MOTOR».
О бесколлекторных низкооборотных двигателях и L6234D.

Стабилизирующий подвес для камеры своими руками. Часть 1.
Ниже речь пойдёт про управление низкооборотными трёхфазными бесколлекторными моторами в статичном режиме с использованием трёхфазного моста L6234.
Но сначала немного теории.
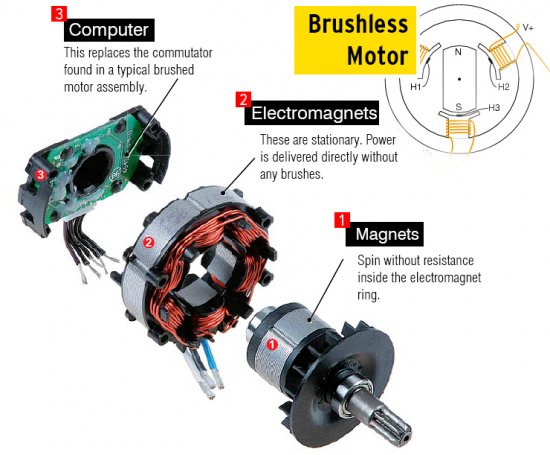
Что такое бесколлекторные моторы?
Как следует из названия, эти моторы у которых отсутствует щёточно-коллекторный узел. На вращающейся части – роторе – расположены постоянные магниты. На неподвижной части – статоре – обмотки электромагнитов. В движение такой мотор приводится изменением тока на разных фазах. Одним из примеров таких моторов являются шаговые двигатели. Изменение электрических фаз приводит к смещению ротора на строго предопределённый угол – один шаг.
Также есть моторы, рассчитанные на постоянное вращение. Например, двухфазные бесколлекторные моторы используются в компьютерных вентиляторах. Трёхфазные моторы используются в моделировании, а также в приводе электрических велосипедов и скутеров.
Отсутствие скользящих контактов щёток позволяет достигать большой мощности и долговечности.
Трёхфазные моторы
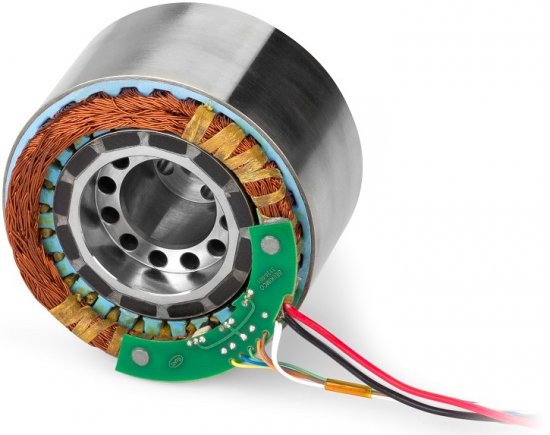
Рассмотрим типичный трёхфазный мотор, используемый в авиамоделировании.
Если ротор с магнитами расположен внутри кольца, образованного электромагнитными катушками, то такой мотор называют inrunner, такие моторы чаще используются в автомоделизме. В авиамоделизме популярна обратная компоновка: корпус ротора с кольцом магнитов вращается вокруг статора с электромагнитами (см. рисунок).

Эти моторы также подразделяются по количеству электромагнитов и количеству полюсов. Наиболее распространённая компоновка 12N14P что означает наличие 12 обмоток статора и 14 магнитных полюсов на роторе. Число полюсов всегда кратно 2: ведь полюса бывают только двух типов – северный и южный. Число обмоток кратно трём, поскольку двигатель трёхфазный. На схеме показана намотка обмоток. A B C – намотка соответствующей обмотки в одну сторону, -a -b -c – в противоположную.
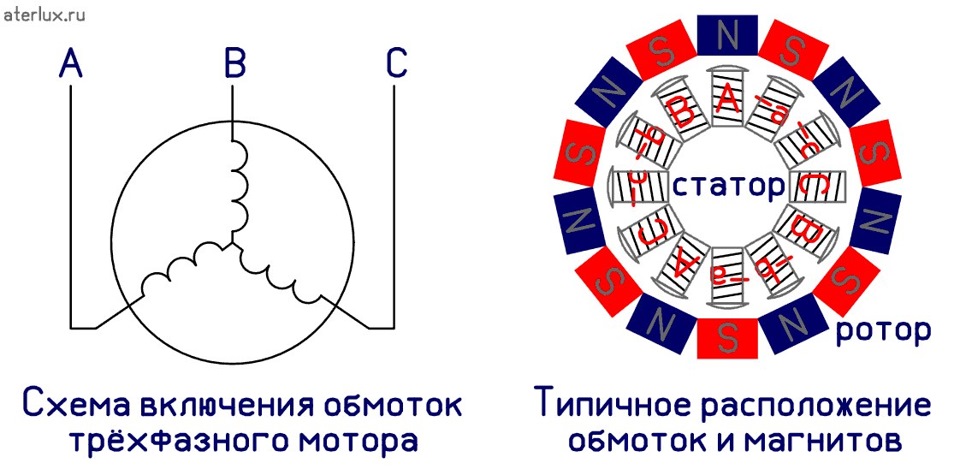
В большинстве случаев обмотки соединяются «звездой», как показано на схеме. Подавая попарно на выходы напряжение той или иной полярности, контроллер мотора пробегает полный электрический цикл, состоящий из 6 смен полярностей. За этот цикл ротор проворачивается на два магнитных полюса. То есть, в нашем случае, чтобы мотор совершил один оборот, электрические фазы должны пройти 7 полных циклов.
Трёхфазный мост
Для электрической коммутации используются трёхфазные мосты, представляющие из себя три блока (полумоста), в каждом из которых по два транзистора – на плюс и на минус. Для управления мотором на одном из трёх полумостов выбирается «плюс», на другом «минус», а третий остаётся отключенным. При помощи ШИМ, транзисторы импульсами коммутируют фазу двигателя к выбранной полярности, пока он не провернётся на нужный угол. Затем схема коммутации меняется. Микроконтроллер в плате управления двигателем определяет моменты, когда фазы должны быть переключены. Для этого используются либо установленные на моторе датчики Холла, либо же ЭДС, возникающая в проводе свободной фазы.
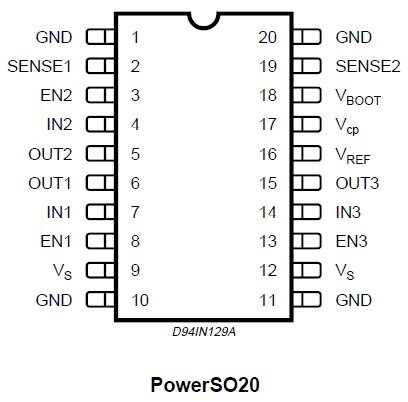
Для управления маломощными моторами годится трёхфазный мост L6234.
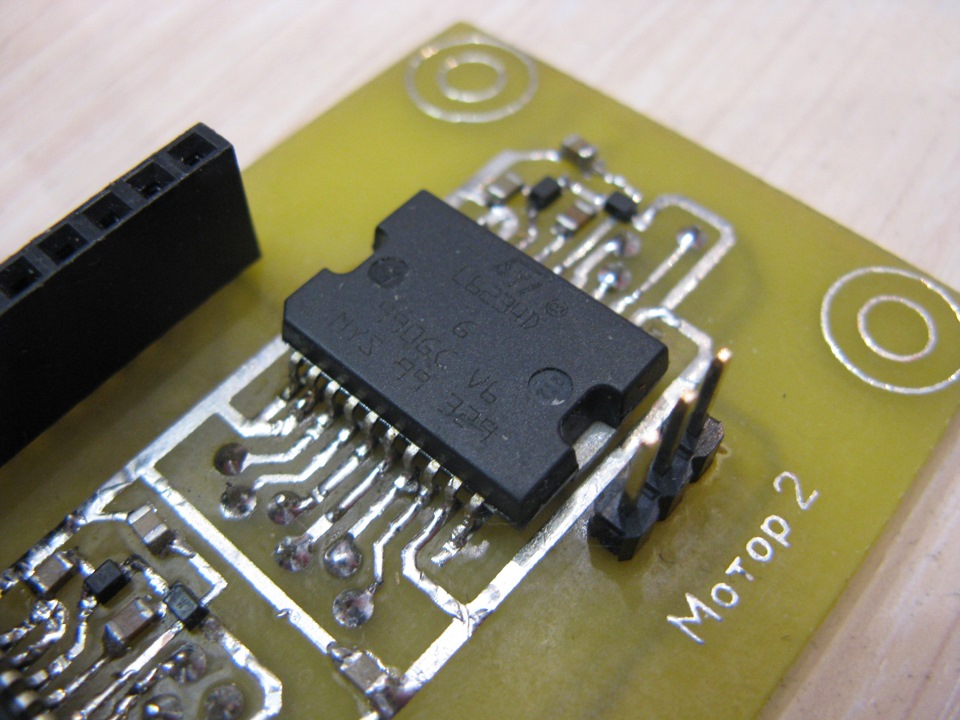
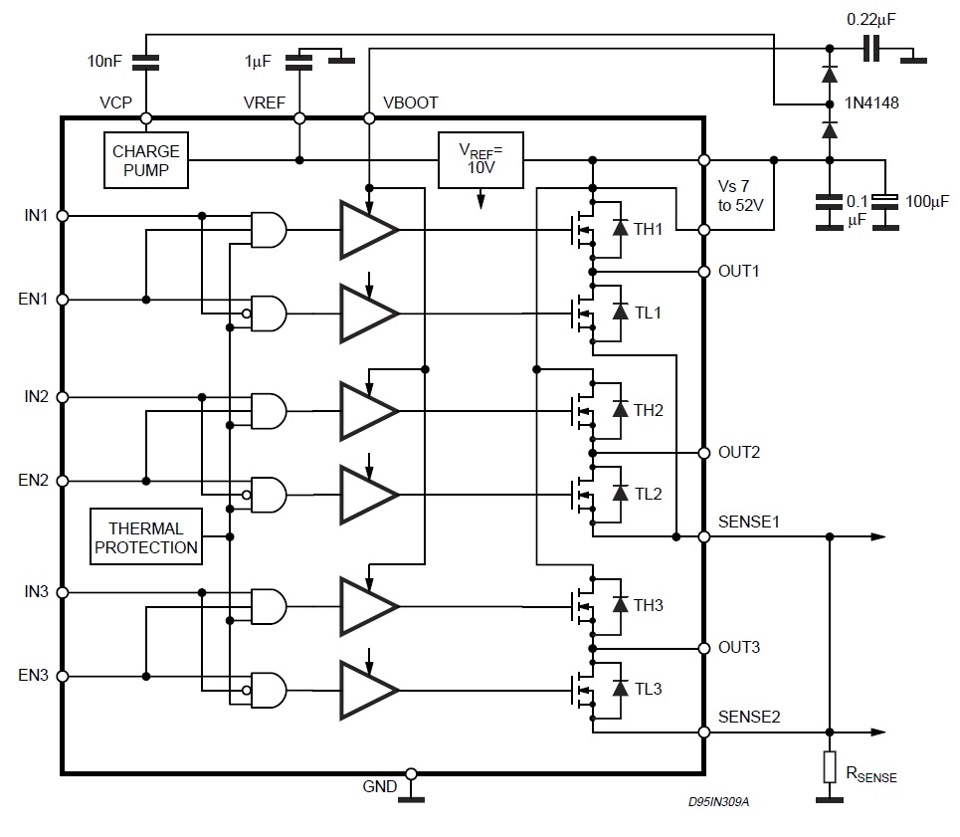
L6234 представляет собой сборку в одном корпусе трёх полумостов, на двух n-МОП транзисторах каждый, драйверов к ним и схемы подкачки напряжения для верхнего ключа. Каждый полумост управляется значениями на двух входах: один из них выбирает полярность (коммутировать плюс, или минус), а второй включает, или отключает полумост. Для управления высокоскоростными моторами вход включения можно использовать для контроля мощности при помощи ШИМ.
Максимальный ток, на который рассчитана микросхема — 4 Ампера.
Низкоскоростные моторы
Обмотки высокооборотистых моторов наматываются пучком толстой проволки, небольшим числом витков, порядка 10-20. Они обладают очень маленьким сопротивлением постоянному току, сила тока достигает десятков Ампер, и если мотор не вращается, обмотка может перегретсья и перегореть.
Но существует разновидность таких моторов, которые предназначены для работы в статичном положении. Их обмотки наматываются большим числом витков (порядка 100) тонкой проволкой. Подавая различные значения напряжений на входы, можно создать в его обмотках магнитное поле нужной полярности, и тем самым зафиксировать его в нужном положении.

Такие моторы представляют собой промежуточное звено между шаговыми двигателями и высокоскоростными моторами: они позволяют статично фиксировать произвольное положение, но не ограничены определёнными «шагами». Используются, в основном, в стабилизирующих подвесах для видеокамер в аэровидеосъёмке. По-английски такие подвесы называются gimbal (=универсальный шарнир), а моторы так и называют gimbal motor.
Управление gimbal-мотором
Для управления можно использовать тот же самый трёхфазный мост L6234. На входы включения (ENx) подаётся постоянный высокий уровень, то есть все три полумоста постоянно включены. А вот входы выбора полярности (INx) подключаются к ШИМ-выходам микроконтроллера. В микроконтроллерах типа ATmega48/88/168/328 и т.п. можно настроить 6 ШИМ-выходов, а значит, управлять сразу двумя такими моторами.
Очень важно, чтобы все ШИМ выходы работали синфазно. То есть, если каждый ШИМ настроен на одно и то же значение, то переключаться они должны строго одновременно. L6234 позволяет коммутировать на частоте до 50кГц, поэтому, для плавной бесшумной работы, можно смело настраивать ШИМ выходы МК на максимальную частоту. При частоте МК 8 МГц и phase-correct режиме выхода, частота ШИМ составит 15 686 Гц.
Для синхронизации таймеров в ATmega48/88/168/328 можно воспользоваться регистром GTCCR, который остановит счёт таймера. Ниже пример настраивающий все 6 ШИМ выходов синфазно. Timer1 при этом работает в 8-битном режиме:
GTCCR = (1 « TSM) | (1 « PSRASY) | (1 « PSRSYNC); // Блокировка счёта
OCR0A = 0;
OCR0B = 0;
OCR1A = 0;
OCR1B = 0;
OCR2A = 0;
OCR2B = 0;
TCCR0A = 0b10100001;
TCCR0B = 0b00000001;
TCNT0 = 0;
TCCR1A = 0b10100001;
TCCR1B = 0b00000001;
TCNT1 = 0;
TCCR2A = 0b10100001;
TCCR2B = 0b00000001;
TCNT2 = 0;
(1 « TSM); // Разблокировка и одновременный запуск таймеров
Если на все 3 ШИМ выхода, управляющие одним мотором, подаётся одно и то же значение, то, хотя полярность каждого моста быстро меняется почти 16 тысяч раз в секунду, поскольку это происходит одновременно, ток через обмотки не идёт. Но если значение ШИМ хоть одного вывода отличается от остальных, то появляется небольшой промежуток времени, когда разные фазы коммутируются с разной полярностью, и через обмотки идёт ток. Чем больше разница значений ШИМ, тем большую часть времени ток будет идти.
Для того, чтобы зафиксировать мотор в нужном положении, значения ШИМ должны быть пропорциональны синусу, со смещением на треть периода (т.е. на 2/3*Pi).
Иначе говоря, значение ШИМ для i-й (от 0 до 2) фазы мотора можно вычислить по формуле:
PWM(i) = 128 + sin(A+ i * 2 / 3 * Pi) * P
Где P – выдаваемая мощность (до 127), A – электрический угол. Изменяя A можно добиться поворота мотора на определённый угол. Напомню, что изменение электрического угла на полный цикл, приводит к повороту мотора на два магнитных полюса. В схеме с 14 магнитами для целого оборота потребуется 7 циклов смены электрического угла
Если вещественную арифметику заменить на целочисленную, а значения синуса хранить в таблице, то скорости МК вполне хватит на управление такими моторами.
Что такое бесколлекторный двигатель постоянного тока и его принцип работы
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
 Рис. 2. Устройство бесколлекторного двигателя
Рис. 2. Устройство бесколлекторного двигателя
Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
 Рис. 3. Конструкция с внешним якорем (outrunner)
Рис. 3. Конструкция с внешним якорем (outrunner)
Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
 Бесколлекторный двигатель в компьютерном дисководе
Бесколлекторный двигатель в компьютерном дисководе
Принцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
 Фазы работы бесколлекторного привода
Фазы работы бесколлекторного привода
Как видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
 Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
 Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
 Рисунок 7. Диаграммы напряжений БД
Рисунок 7. Диаграммы напряжений БД
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
 Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Преимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
Бесщеточные шуруповерты: чем они лучше обычных
Бесщеточные моторы известны с 1960-х годов, но только в 2004 году они «перекочевали» с промышленных двигателей на ручной электроинструмент (пионером стала компания Makita, наладившая выпуск таких дрелей для аэрокосмической отрасли). Еще пару лет спустя первые шуруповерты Festool с бесщеточными двигателями поступили в свободную продажу. А сейчас уже практически невозможно найти приличного производителя электроинструмента, у которого в каталоге продукции не было бы пары десятков устройств, оснащенных моторами, не имеющими щеток. Чем же они так хороши? В этой статье мы попробуем разобраться, в чем заключаются преимущества и недостатки бесщеточных двигателей, и есть ли смысл за них доплачивать.

Конструкция и принцип работы двигателя электроинструмента
Начнем с небольшого экскурса в школьный курс физики и вспомним принцип работы простейшего электромотора традиционной конструкции. Основными деталями классического коллекторного двигателя постоянного тока являются:
- статор (индуктор) — это неподвижная деталь в виде кольца из постоянных магнитов либо стального цилиндра, на котором находятся обмотки главных и добавочных полюсов (они выполняют функции электромагнитов, которые создают магнитный поток);
- ротор (якорь) — это вращающаяся деталь в виде «барабана» с сердечником из ферромагнитного материала. В его пазах уложены секции медной обмотки;
- коллектор — это цилиндр, собранный из множества изолированных друг от друга медных пластинок, количество которых соответствует числу секций на роторе;
- щетки — это небольшие детали, сделанные из графита. Они подключены к электроцепи и подпружинены, чтобы обеспечить постоянный и плотный скользящий контакт с коллектором.
 |
| Устройство коллекторного двигателя. |
При включении двигателя ток через щетки поступает на коллектор, а оттуда — на обмотку якоря. При протекании тока через обмотку возникает магнитное поле. Взаимодействуя с постоянным магнитным полем, которое создает статор, ротор вращается за счет того, что одноименные полюса отталкиваются, а разноименные — притягиваются друг к другу. При вращении коллектора, который закреплен на одном валу с якорем, щетки «перескакивают» с одной контактной площадки на другую. При этом меняется направление тока в обмотках ротора, разноименные полюса становятся одноименными, они снова отталкиваются друг от друга — и вращение продолжается. Таким образом, коллектор — это один из самых важных узлов коллекторного (щеточного) двигателя, потому что он выполняет сразу две важные функции: преобразует постоянный ток в переменный и одновременно является датчиком поворота вала.
Двигатели данной конструкции относительно простые и дешевые. Но коллекторно-щеточный узел — это источник потенциальных проблем. Трение между деталями и постоянное замыкание-размыкание пластинчатых контактов приводят к быстрому износу щеток, искрению на контактах и чрезмерному нагреву двигателя.
Разница между бесщеточными двигателями и обычными моторами
Вентильные (бесщеточные, бесколлекторные) двигатели работают по тем же физическим принципам, но устроены иначе. Они являются словно бы «вывернутой наизнанку» версией коллекторных моторов: магниты установлены на роторе, а обмотка — на неподвижном статоре. Таким образом, можно просто припаять провода питания к обмотке и избавиться от щеток вместе со всеми их недостатками.
 |
| Устройство бесщеточного двигателя. |
Если у коллекторного двигателя переключение направления тока производится механически (при «перескакивании» щетки с одной контактной пластины на следующую), то в вентильном моторе этим занимается электроника. Получая сигналы от датчика (оптического, магнитного или основанного на эффекте Холла), который «считывает» угол поворота ротора, электроника своевременно переключает полюса, изменяя направление тока. То есть, комплекс из датчика и управляющей платы выполняет функции коллектора, но без механических и электрических потерь за счет отсутствия физического контакта между подвижной и неподвижной частями электромотора.
Преимущества бесщеточных двигателей в теории
Зная, как устроены оба вида электромоторов, и в чем заключается разница между коллекторными и бесщеточными двигателями, можно сделать выводы об их преимуществах и недостатках.
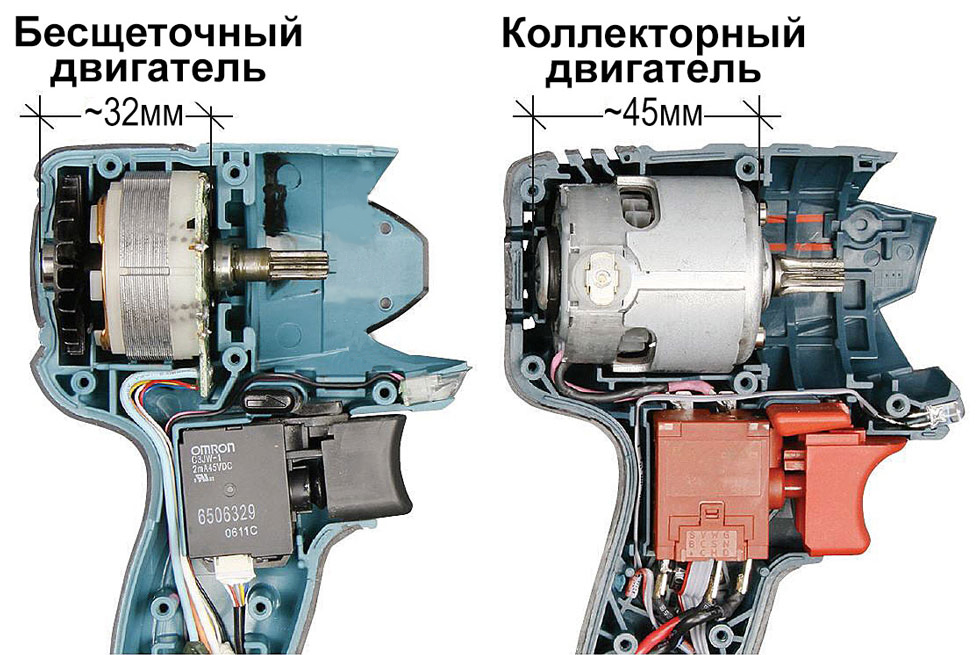
- меньше по размеру — отсутствие коллектора позволяет сократить длину двигателя (при примерно одинаковом диаметре) и уменьшить его вес;
- более надежные — механический износ отсутствует практически полностью, а абразивная пыль, попадающая внутрь корпуса, не так вредна из-за отсутствия коллекторно-щеточного узла;
- меньше греются — при работе выделяется значительно меньше тепла благодаря существенному уменьшению потерь на трение;
- более энергоэффективные — электрические потери на коммутацию снижены в разы за счет замены коллектора и щеток на электронные ключи. Коэффициент полезного действия у бесщеточного двигателя достигает 80% – 90% (по сравнению с 65% – 75% у коллекторного мотора);
- лучше переносят короткие перегрузки — при работе под большой нагрузкой остается некоторый «запас прочности», позволяющий на короткое время повысить напряжение в цепи и увеличить тепловыделение от обмоток без вреда для мотора.
Преимущества бесщеточного инструмента на практике
Описанные выше теоретические преимущества на практике дают потрясающий результат. Шуруповерты с бесщеточными двигателями:
- меньше и легче — разница в размерах и весе двигателей позволяет производителям выпускать легкие и компактные устройства, которые значительно удобнее в работе;
- более мощный и оборотистый — замена механических узлов на электронные системы управления позволяет более эффективно расходовать энергию и гибче управлять характеристиками мотора;
- дольше работает на одной зарядке — аккумуляторные шуруповерты с бесщеточными двигателями работают от батареи на 30% – 50% дольше, чем устройства с традиционными электромоторами;
- не перегревается — незначительное тепловыделение от вентильного двигателя позволяет делать меньше пауз во время работы для охлаждения инструмента;
- работает тише и плавнее — трение в коллекторно-щеточном узле неизбежно вызывает шум и повышенную вибрацию, а бесщеточные моторы лишены этого изъяна;
- не искрит — шуруповерты с вентильными двигателями можно использовать при работе рядом с топливными емкостями или кислородными баллонами;
- требует меньше обслуживания — о проблемах, связанных с подбором, покупкой и заменой графитовых щеток, можно полностью забыть;
- реже выходит из строя — отсутствие пары трения «щетка-коллектор», способность переносить высокие нагрузки и стойкость к воздействию пыли значительно повышают надежность электроинструмента и существенно увеличивают срок его службы.
Наглядно о разнице между бесщеточными двигателями и обычными:
Почему бесщеточный инструмент такой дорогой
Так почему же бесщеточный шуруповерт стоит значительно дороже, чем аналогичные устройства с двигателями традиционной конструкции? Тому есть несколько веских причин. Высокая цена обусловлена наличием нескольких дорогостоящих деталей и элементов.
- Мощные неодимовые магниты, необходимые для создания компактных роторов бесщеточных двигателей, весьма дороги. Они изготавливаются по сложному технологическому процессу путем спекания недешевых редкоземельных элементов.
- Требования к качеству датчиков очень высокие. Они должны быть сверхнадежными и максимально точными, чтобы включать и выключать подачу тока синхронно с движением магнитов, которые находятся на роторе, вращающемся с огромной скоростью.
- Электроника, способная управлять бесщеточным двигателем, на порядок дороже, чем аналогичные модули коллекторных моторов. Грубо говоря, работой бесщеточного шуруповерта управляет не примитивная плата, а почти что микропроцессор, который постоянно отслеживает множество параметров и на лету их изменяет, в зависимости от того, какая задача является наиболее приоритетной в данный момент (максимальные мощность и момент на валу, оптимальное потребление энергии АКБ или защита от перегрузки).
Совокупность перечисленных факторов и является той причиной, почему бесщеточный инструмент такой дорогой.
Но у столь сложной и высокотехнологичной конструкции есть и «побочный эффект». Бесщеточный инструмент дорогой не только в производстве, но и в ремонте. В случае повреждения или выхода из строя основные детали бесколлекторного двигателя (якорь и электронные платы) меняются только целыми узлами в сборе. Поэтому ремонт бесщеточного инструмента нередко «влетает в копеечку».
Стоит ли покупать инструмент с бесщеточным двигателем?
В заключение можно сделать вывод, что бесщеточный двигатель — это не маркетинговая уловка, а реальное преимущество. Но приобретение инструмента с таким мотором целесообразно не всегда.
Если вы планируете купить аккумуляторный инструмент профессионального класса, то стоит присмотреться к бесщеточным устройствам. Несмотря на разницу в цене, покупка будет оправданной, поскольку шуруповерты, болгарки, дрели, реноваторы и другая техника, оснащенная современными бесколлекторными моторами, служат дольше и не так быстро «убивают» дорогостоящие аккумуляторы .
А вот при выборе инструмента хобби-класса переплачивать за «новомодный» двигатель пока что нет смысла. При эпизодическом использовании и работе в неспешном темпе дома или на даче разница в характеристиках между бесщеточными шуруповертами и обычными будет далеко не столь заметна.
Современные бесколлекторные двигатели постоянного тока

Благодаря существенному прогрессу в области полупроводниковой электроники и в технологии создания мощных неодимовых магнитов, широкое распространение получили сегодня бесколлекторные двигатели постоянного тока. Они применяются в стиральных машинах, пылесосах, вентиляторах, дронах и т. д.
И хотя идея касательно принципа работы бесколлекторного двигателя высказывалась еще в начале 19 века, она ждала своего часа до начала полупроводниковой эры, когда технологии стали готовы к практической реализации этой интересной и эффективной концепции, позволившей бесколлекторным двигателям постоянного тока шагать так широко, как это происходит сегодня.

В англоязычной версии двигатели данного типа именуются BLDC motor – Brushless Direct Current Motor — бесщеточный двигатель постоянного тока. Ротор двигателя содержит постоянные магниты, а рабочие обмотки располагаются на статоре, то есть устройство BLDC двигателя полностью противоположно тому, как это имеет место в классическом коллекторном двигателе. Управляется BLDC двигатель электронным регулятором, который называют ESC — Electronic speed controller — электронный регулятор хода.
Электронный регулятор хода и высокий КПД
Электронный регулятор хода позволяет плавно варьировать электрическую мощность, подаваемую на бесколлекторный электродвигатель. В отличие от ранних, более простых версий резистивных регуляторов хода, которые просто ограничивали мощность путем включения в цепь последовательно с двигателем активной нагрузки, превращающей избыточную мощность в тепло, электронный регулятор хода позволяет получить значительно более высокий КПД, не расходуя подводимую электрическую энергию на бесполезный нагрев.
Бесколлекторный двигатель постоянного тока можно классифицировать как самосинхронизируемый синхронный двигатель, в котором полностью исключен искрящий узел, требующий регулярного обслуживания — коллектор. Функцию коллектора несет на себе электроника, благодаря чему вся конструкция изделия сильно упрощается и становится компактнее.
Щетки заменены, по сути, на электронные ключи, потери в которых сильно меньше чем были бы при механической коммутации. Мощные неодимовые магниты на роторе позволяют добиться большего момента на валу. И греется такой двигатель меньше нежели его коллекторный предшественник.
В итоге КПД двигателя получается наилучшим, а показатели мощности на килограмм веса — выше, плюс достаточно широкий диапазон регулировки скорости вращения ротора и практически полное отсутствие генерируемых радиопомех. Конструктивно двигатели данного типа легко адаптируются для эксплуатации в воде и в агрессивных средах.
Электронный блок управления — очень важная и дорогостоящая часть бесколлекторного двигателя постоянного тока, без которой, однако, никак не обойтись. От данного блока двигатель получает питание, параметры которого одновременно влияют и на скорость, и на мощность, которую двигатель будет в состоянии развить под нагрузкой.
Даже если скорость вращения регулировать не нужно, все равно электронный блок управления необходим, ведь он несет на себе не только функцию управления, но также имеет силовую составляющую. Можно сказать, что ESC – это аналог частотного регулятора для асинхронных двигателей переменного тока, специально предназначенный для питания и управления бесколлекторным двигателем постоянного тока.
Управление двигателем BLDC
Чтобы понять как происходит управление BLDC двигателем, сначала вспомним как работает коллекторный двигатель. В его основе принцип вращения рамки с током в магнитном поле.
Каждый раз, когда рамка с током повернулась и нашла положение равновесия, коммутатор (щетки прижатые к коллектору) изменяет направление тока через рамку, и рамка движется дальше. Этот процесс повторяется при движении рамки от полюса к полюсу. Только вот в коллекторном двигателе таких рамок много и магнитных полюсов несколько пар, поэтому коллекторно-щеточный узел содержит не два контакта, а много.
Электронный блок управления бесколлекторным двигателем делает то же самое. Он изменяет полярность магнитного поля как только ротор необходимо провернуть дальше из положения равновесия. Только управляющее напряжение подается не на ротор, а на обмотки статора, и делается это при помощи полупроводниковых ключей в нужные моменты времени (фазы ротора).
Очевидно, что ток на обмотки статора бесколлекторного двигателя необходимо подавать в правильные моменты времени, то есть тогда, когда ротор находится в определенном известном положении. Для этого применяется один из следующих методов. Первый — на основе датчика положения ротора, второй — путем измерения ЭДС на одной из обмоток, которая в данный момент не получает питание.
Датчики бывают разными, магнитными и оптическими, наиболее популярны магнитные датчики на основе эффекта Холла. Второй способ (на основе измерения ЭДС) хотя и эффективен, однако он не позволяет осуществлять точное управление на низких скоростях и при старте. А вот датчики Холла обеспечивают возможность более точного управления во всех режимах. В трехфазных BLDC двигателях таких датчиков три штуки.
Двигатели без датчиков положения ротора применимы в тех случаях, когда старт двигателя происходит без нагрузки на валу (вентилятор, пропеллер и т. п.). Если же старт происходит под нагрузкой, необходим двигатель с датчиками положения ротора. В том и в другом варианте есть свои плюсы и минусы.
Решение с датчиком оборачивается более удобным управлением, но при выходе из строя хотя бы одного из датчиков, двигатель придется разбирать, к тому же датчики требуют отдельных проводов. В варианте без датчика нет надобности в специальных проводах, но во время старта ротор будет раскачиваться туда-сюда. Если это недопустимо, необходимо ставить в систему датчики.
Ротор и статор, количество фаз
Ротор BLDC двигателя может быть наружным или внутренним, а статор, соответственно, внутренним или наружным. Статор изготавливают из магнитопроводящего материала, с количеством зубцов, которое нацело делится на количество фаз. Ротор может быть изготовлен необязательно из магнитопроводящего материала, но обязательно с жестко зафиксированными на нем магнитами.

Чем сильнее магниты — тем выше доступный вращающий момент. Количество зубцов статора не обязательно должно быть равно количеству магнитов на роторе. Минимальное количество зубцов равно количеству фаз управления.
Большинство современных бесколлекторных двигателей постоянного тока — трехфазные, просто в силу простоты такой конструкции и способа управления ею. Как и в асинхронных двигателях переменного тока, обмотки трех фаз соединяются здесь на статор «треугольником» либо «звездой».
Такие двигатели без датчиков положения ротора имеют 3 питающих провода, а двигатели с датчиками — 8 проводов: дополнительные два провода — для питания датчиков и три — сигнальные выводы датчиков.
 Обмотка статора выполняется изолированным медным проводом так, чтобы сформировать магнитные полюса необходимого количества фаз, равномерно распределенные по окружности ротора. Количество отдельно стоящих полюсов на статоре для каждой фазы выбирается исходя из требуемой скорости вращения двигателя (и вращающего момента).
Обмотка статора выполняется изолированным медным проводом так, чтобы сформировать магнитные полюса необходимого количества фаз, равномерно распределенные по окружности ротора. Количество отдельно стоящих полюсов на статоре для каждой фазы выбирается исходя из требуемой скорости вращения двигателя (и вращающего момента).
Низкооборотные двигатели с наружным ротором делают с большим количеством полюсов (и соответственно зубцов) на каждую фазу, чтобы получить вращение с угловой частотой значительно меньше частоты управляющего тока. Но даже в высокооборотных трехфазных двигателях обычно не применяют количество зубцов меньше 9.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети: