Индуктивный датчик: принцип работы, схемы подключения, характеристики
В современных станках и высокоточном оборудовании, где важно контролировать положение конструктивных элементов устанавливается индуктивный датчик. Для чего применяется данное устройство, какие разновидности и способы подключения существуют, как оно работает, мы рассмотрим в данной статье.
Назначение
Индуктивный датчик предназначен для контроля перемещения рабочего органа без непосредственного контакта с ним. Основной сферой применения для него является станочное оборудование, точные медицинские приборы, системы автоматизации технологических процессов, измерения и контроля формы изделия. В соответствии с положениями п.2.1.1.1 ГОСТ Р 50030.5.2-99 это датчик, который создает электромагнитное поле в области чувствительности и обладает полупроводниковым коммутатором.
Сфера применения индуктивных датчиков во многом определяется их высокой надежностью и устойчивостью к воздействию внешних факторов. На их показания и работу не влияют многие факторы окружающей среды: влага, оседание конденсата, скопление пыли и грязи, попадание твердых частиц. Такие особенности обеспечиваются их устройством и конструктивными данными.
Устройство
Развитие сегмента радиоэлектроники привело не только к совершенствованию первоначальных механизмов, но и к возникновению принципиально новых индуктивных датчиков. В качестве примера рассмотрим один из простейших вариантов (рисунок 1):
 Рис. 1. Устройство индуктивного датчика
Рис. 1. Устройство индуктивного датчика
Как видите на рисунке, в его состав входят:
- магнитопровод или ярмо (1) – предназначен для передачи электромагнитного поля от генератора в зону чувствительности;
- катушка индуктивности (2) – создает переменное электромагнитное поле при протекании электрического тока по виткам;
- объект измерения (3) – металлический якорь, вводимый или перемещаемый в области чувствительности, неметаллические предметы не способные влиять на состояние электромагнитного поля, поэтому они не используются в качестве детектора;
- зазор между объектом измерения и основным магнитопроводом (4) – обеспечивает меру взаимодействия в качестве магнитного диэлектрика, в зависимости от модели датчика и способа перемещения может оставаться неизменным или колебаться в заданном диапазоне;
- генератор (5) — предназначен для генерации электрического напряжения заданной частоты, которое будет создавать переменное магнитное поле в заданной области.
Принцип работы
Принцип действия индуктивного датчика заключается в способности электромагнитного поля изменять свои параметры, в зависимости от значения магнитной проводимости на пути протекания потока. В основе его работы лежит классический вариант катушки, намотанной на сердечник.
 Рис. 2. Магнитное поле в состоянии покоя
Рис. 2. Магнитное поле в состоянии покоя
При протекании электрического тока I по виткам этой катушки генерируется магнитное поле (см. рисунок 2), результирующий вектор магнитной индукции B которого определяется по правилу Правой руки. При движении магнитного поля по сердечнику, ферромагнитный материал обеспечивает максимальную пропускную способность. Но, как только линии магнитной индукции попадают в воздушное пространство, магнитная проводимость существенно ухудшается и часть поля рассеивается.
 Рис. 3. Магнитное поле при введении объекта срабатывания
Рис. 3. Магнитное поле при введении объекта срабатывания
При внесении в область действия поля индуктивного датчика объекта срабатывания (рисунок 3), изготовленного из металла, напряженность линий индукции резко изменяется. В результате чего усиливается поток и меняется его значение, а это, в свою очередь, приводит к изменению электрической величины в цепи катушки за счет явления взаимоиндукции. На практике этот сигнал слишком мал, поэтому для расширения предела измерения индуктивного датчика в их схему включается усилитель.
Расстояние срабатывания и объект воздействия
В зависимости от конструкции и принципа действия индуктивного датчика объект воздействия может иметь вертикальное или горизонтальное перемещение относительно самого измерителя. Однако реакция сенсора на начало движения контролируемого объекта может начинаться не сразу, что обуславливается номинальным расстоянием, при котором обеспечивается зона чувствительности датчика и техническими параметрами объекта.
 Рис. 4. Область и объект срабатывания
Рис. 4. Область и объект срабатывания
Как видите на рисунке 4, в первом положении контролируемый объект находится на таком удалении, где электромагнитные линии не достигают его поверхности. В таком случае с индуктивного датчика сигнал сниматься не будет, так как он не фиксирует перемещения в зоне чувствительности. Во втором положении контролируемый объект уже пересек расстояние срабатывания и вошел в чувствительную зону. В результате взаимодействия с объектом на выходе датчика появится соответствующий сигнал.
Также расстояние срабатывания будет зависеть от геометрических размеров, формы и материала. Следует заметить, что в качестве объекта срабатывания индуктивного датчика применяются только металлические предметы, но от конкретного типа будет отличаться и момент перехода датчика в противоположное состояние, что изображено на диаграмме:
 Рис. 5. Зависимость расстояния срабатывания от материала
Рис. 5. Зависимость расстояния срабатывания от материала
На практике существует огромное разнообразие индуктивных датчиков, всех их можно разделить на две большие категории, в зависимости от рода питающего тока – переменного и постоянного. В зависимости от состояния контактов в соответствии с таблицей 1 р.3 ГОСТ Р 50030.5.2-99 индуктивные датчики бывают:
- замыкающий – при перемещении контролируемого объекта происходит перевод во включенное положение;
- размыкающий – в случае воздействия индуктивный датчик переводит контакты в отключенное положение;
- переключающий – одновременно объединяет оба предыдущих варианта, за одну коммутацию переводит один вывод во включенное, второй, в отключенное положение.
По количеству измерительных цепей индуктивные датчики подразделяются на одинарные и дифференциальные. Первый из них обладает одной катушкой и одной цепью измерения. Второй тип подразумевает наличие двух сенсоров, измерительные цепи которых включаются в противофазу для сравнения показаний.
 Рис. 6. Одинарый и дифференциальный датчик
Рис. 6. Одинарый и дифференциальный датчик
По способу передачи данных индуктивные датчики подразделяются на аналоговые, электронные и цифровые. В первом случае применяются те же катушки и ферромагнитные сердечники. Электронные используют триггер Шмидта вместо ферромагнетиков для получения гистерезисной составляющей. Цифровые выполняются в формате печатных плат на микросхемах. Помимо этого виды подразделяются по количеству выводов датчика: два, три, четыре или пять.
Характеристики (параметры)
При выборе индуктивного датчика для решения конкретной задачи руководствуются параметрами цепи, в которых он будет функционировать и основной логикой схемы. Поэтому обязательно проверяется соответствие их параметров:
- напряжение питания – определяет допустимый минимум и максимум разности потенциалов, при которой индуктивный датчик нормально работает;
- минимальный ток срабатывания – наименьшее значение нагрузки, при котором произойдет переключение;
- расстояние срабатывания – допустимый промежуток удаления, при котором будет происходить коммутация;
- индуктивное и магнитное сопротивление – определяет проводимость электрического тока и линий магнитной индукции для конкретной модели;
- поправочный коэффициент – применяется для внесения поправки, в зависимости от дополнительных факторов;
- частота переключений – максимально возможное количество раз коммутации в течении секунды;
- габаритные размеры и способ установки.
Примеры подключения на схемах
Конструктивные особенности индуктивных датчиков определяют количество их выводов и способ дальнейшего подключения. В виду того, что существует четыре наиболее распространенных типа, рассмотрим примеры схем их подключения.
Двухпроводных датчиков индуктивности
Как видите на схеме выше, двухпроводные индуктивные датчики применяются исключительно для непосредственной коммутации нагрузки: контакторов, пускателей, катушек реле в качестве электронного выключателя. Это наиболее простая схема и модель, но работа конкретной модели сильно зависит от параметров подключаемой нагрузки.
Трехпроводных датчиков индуктивности
В трехпроводной схеме присутствует два вывода на питание самого индуктивного датчика, а третий, предназначен для подключения нагрузки к нему. По способу коммутации их подразделяют на PNP и NPN, первый вид коммутирует положительный вывод, откуда и происходит название, второй тип коммутирует отрицательный вывод.
Четырехпроводных датчиков индуктивности
По аналогии с предыдущим датчиком, четырехпроводный также использует два вывода 1 и 3 для получения питания. А вот 2 и 4 вывод используется для подключения нагрузки с той разницей, что коммутация для обеих нагрузок будет противоположной.
Пятипроводных датчиков индуктивности
В пятипроводном индуктивном датчике два вывода применяются для подачи напряжения на чувствительный элемент датчика, в рассматриваемом примере это 1 и 3. Два вывода 2 и 4 подают питание на разные нагрузки, а управляющий вывод 5 позволяет выбирать различные режимы работы и менять логику переключений.
Преимущества и недостатки
В сравнении с другими типами сенсорных устройств индуктивные датчики продолжают занимать весомую нишу, наращивая темпы внедрения в различные сферы промышленности и отрасли народного хозяйства. Такое частое применение объясняется рядом весомых преимуществ:
- высокая надежность за счет простой конструкции и отсутствия подвижных контактов;
- может функционировать как от бытовой сети, так и от специальных генераторов, преобразователей и прочих источников питания;
- способны обеспечивать значительную мощность на выходе — порядка нескольких десятков Ватт;
- характеризуются высокой чувствительностью в зоне измерения.
Но, вместе с тем, существуют и недостатки индуктивных датчиков, которые не позволяют использовать их повсеместно. Среди наиболее существенных минусов являются громоздкие размеры, не позволяющие монтировать их в любых устройствах. Также к недостаткам относится зависимость параметров работы от температурных и других факторов, вносящих поправку на точность.
Как работают индукционные датчики положения и зачем нужна технология CIPOS

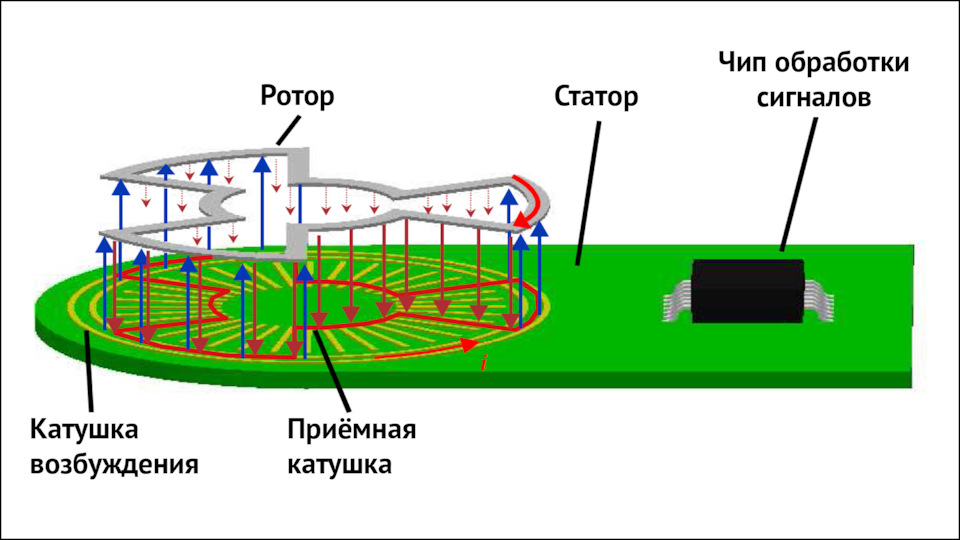
Что объединяет ускорение, торможение, рулевое управление и переключение передач? Все эти относящиеся к безопасному вождению процессы требуют точной регистрации положения механических узлов и управления их перемещением. В современном автомобиле эти функции реализуются при участии бесконтактных индукционных датчиков положения, которые также известны как датчики траектории или датчики угла положения. Они и сейчас играют ключевую роль во всё большем числе автомобилей, а скоро без них и вовсе будет не обойтись. Объясняем, почему так, как они работают, что такое технология CIPOS и причём тут Hella.

Принципиальное устройство индукционных датчиков
Работа датчика основана на явлении электромагнитной индукции. Оно, кратко напомним школьный курс физики, состоит в том, что в замкнутом проводнике, находящемся в переменном магнитном поле, возникает электрический ток. Помните опыт, когда к выводам катушки из нескольких витков провода подсоединяли вольтметр, а затем вносили в катушку магнит? При этом стрелка вольтметра отклоняется — это происходит благодаря электромагнитной индукции.
Вот в этом видеоролике о самом явлении и истории его открытия рассказывается подробнее. Потратьте три минуты времени, чтобы освежить знания:
Обратите внимание: металлический магнит не касается витков катушки, но она реагирует на его приближение и удаление.
Теперь рассмотрим, как устроен индукционный датчик. Его принципиальная схема изображена на рисунке:

Под действием электрического тока, протекающего по катушке (2), в ней возникает магнитное поле. Поскольку магнитная проводимость у железного сердечника (1) лучше, чем у воздуха, магнитное поле концентрируется в сердечнике и рассеивается в воздухе.
Если вблизи сердечника катушки появляется металлический предмет (3), рассеивание магнитного поля уменьшается, магнитный поток в сердечнике возрастает. Изменение магнитного поля вызывает изменение величины электрического тока в катушке — на резисторе R меняется напряжение — датчик срабатывает. Другими словами, появление в магнитном поле катушки металлического предмета изменяет её индуктивность — изменение индукции фиксируется электроникой. (Разумеется, в реальности картина сложнее, но для принципиального понимания работы индукционного датчика подробности можно опустить.)
Очевидно, что индукционный датчик реагирует только на металлические элементы — неметаллические предметы не проводят электрический ток, поэтому на переменное магнитное поле никак не влияют. Помимо этого, поскольку магнитное поле быстро уменьшается с расстоянием, контролируемый объект должен располагаться в зоне чувствительности датчика.
В этом видеоролике принцип работы индукционных датчиков рассмотрен на более высоком уровне — для его понимания нужно знание физики:
Преимущества индукционных датчиков
Из описания устройства индукционных датчиков следует два их важных (в частности, для автомобилестроения) свойства во-первых, они в процессе эксплуатации не изнашиваются — в них просто нечему ломаться; во-вторых, появляется возможность сделать корпус датчика водонепроницаемым.
Использование для питания катушки переменного тока высокой частоты повышает помехозащищённость датчиков: они не реагируют на магнитные поля, возникающие при работе электромоторов и при протекании больших токов по проводам, проложенным вблизи датчиков.
Индукционные датчики отличаются от других типов сенсоров также другими преимуществами:
— высокой точностью;
— быстрым срабатыванием и безынерционностью;
— способностью работать в широком диапазоне температур;
— способностью работать во влажной и химически агрессивной среде;
— конструктивной гибкостью.
В работе индукционных датчиков очень мало систематических погрешностей. Датчики чувствительны к нестабильности питающего напряжения, но это компенсируется незначительным усложнением электрической схемы их подключения.
Что такое технология CIPOS и почему она важна
CIPOS® (от англ. Contactless Inductive Position Sensors) — технология компании Hella, на основе которой разработаны бесконтактные индукционные датчики положения, отвечающие требованиям электромагнитной совместимости.
Hella разработала технологию CIPOS в конце 1990-х годов. Сегодня она применяется в электронных датчиках педалей, рулевого механизма, датчиках выравнивания положения кузова, а также датчиках положения, установленных на валу двигателя. Эта же технология используется в приводном механизме турбонаддува, в дроссельных заслонках, реле радиаторной решетки и в электромагнитных клапанах.
Особенность бесконтактных датчиков CIPOS заключается не только в их высокой надёжности и безотказности. Помимо этого, они позволяют определять положение контролируемого элемента в абсолютных величинах. Благодаря этому датчик может сообщить в блок управления правильные данные сразу же после включения питания. В этом преимущество абсолютных датчиков перед инкрементальными датчиками, которым после включения нужна калибровка для определения «точки отсчёта». Цифровую обработку сигналов производят разработанные Hella чипы, входящие в конструкцию каждого датчика CIPOS.
Поскольку усилия инженеров направлены на уменьшение массы и габаритов автомобилей с целью экономии энергоресурсов, компоновка агрегатов становится всё более плотной. В результате в моторном отсеке становится теснее — и жарче. Компактные и конструктивно гибкие датчики CIPOS способны работать в условиях вибрации, повышенной влажности и при экстремальных температурах от –40°C до +170°C и более. При этом их форма, габариты и диапазон измерений легко адаптируются для решения конкретных задач.
Технология CIPOS остается одним из ключевых компонентов автомобилей с режимом автономного вождения и электромобилей. Электромобили с использованием бесщёточных двигателей обладают внушительным КПД и, соответственно, генерируют большую выработку тока. В датчиках CIPOS, работающих индуктивно в диапазоне 3–4 МГц, не используются постоянные электромагниты, а следовательно, в силу естественных свойств они не подвержены действию магнитных полей, создаваемых током двигателя.
Где найти индукционные датчики в автомобиле
Составить общее представление о местах размещения индукционных датчиков в современном автомобиле вам поможет этот короткий видеоролик от Hella:
Если предпочитаете читать, а не смотреть, то вот вам примерный, но не полный, список узлов и агрегатов, где в современных автомобилях применяются индукционные датчики:
— датчики положения дроссельной заслонки и педали газа;
— датчики педали тормоза и сцепления;
— приводной механизм турбонаддува;
— датчик реле управления радиаторной решёткой (в просторечии «жабры»);
— различные электромагнитные клапаны.
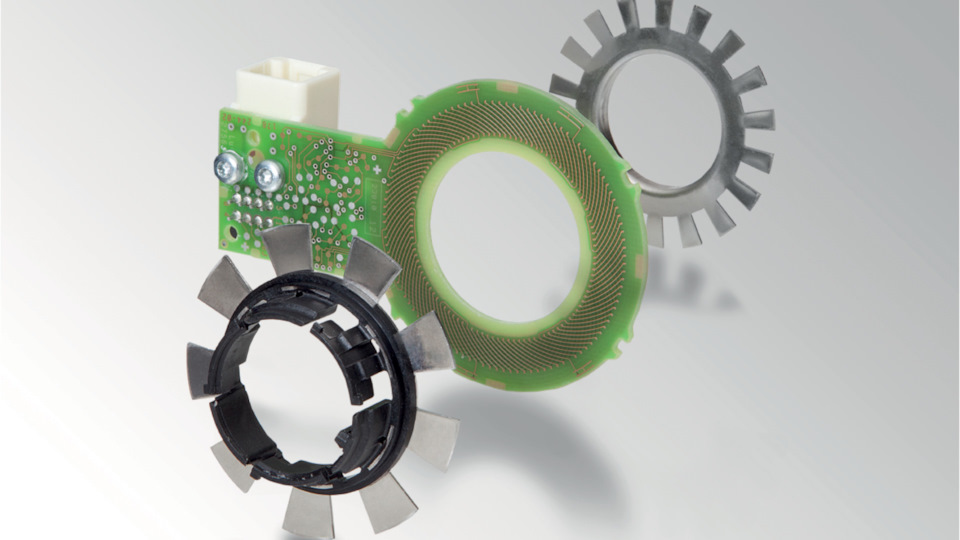
В продуктовой линейке Hella имеется множество индукционных датчиков. Вот несколько примеров, которые помогут читателю составить более предметное представление о них.




750 миллионов и будет больше
Сочетание возможностей и надёжности индукционных датчиков обеспечивают им широкую область применения. Они являются примером по-настоящему массового изделия. За два десятилетия компания Hella произвела более 750 миллионов датчиков, и их выпуск растёт.
Индукционные датчики являются необходимым компонентом автоматики, широко применяются в электромобилях. Это закономерно, ведь в движение электромобиль приводится электромоторами, создающими неблагоприятную электромагнитную среду, в которой трудно работать сенсорам, устроенным по альтернативным принципам. В ближайшие пару десятилетий электромобилей будет выпускаться гораздо больше. Даже General Motors объявила об отказе от выпуска автомобилей с ДВС после 2035 года. А значит, и производство и применение индукционных датчиков будет всё шире и шире.
Познакомиться с ассортиментом датчиков Hella можно в каталоге по ссылке. Если же у вас появились вопросы, задавайте их в комментариях под этим постом — мы постараемся на них ответить.
Индуктивный датчик – устройство, принцип работы, параметры и классификация
Различного типа датчики сегодня широко применяются в промышленности. Без них ни один технологический процесс не обходится. Существует несколько их видов, нас же в этой статье будет интересовать индуктивный датчик. Поэтому разберемся, для чего он необходим, где применяется, его устройство и принцип работы.
 Бесконтактные индуктивные датчики
Бесконтактные индуктивные датчики
По сути, датчик данного типа – это прибор, принцип работы которого основан на изменениях индуктивности катушки и сердечника. Кстати, отсюда и само название. Изменения индукции происходят из-за того, что в магнитное поле катушки проникает металлический предмет, изменяя его. А соответственно и изменяется схема подключения, в которой основную роль играет компаратор. Он при изменении индукции подает сигнал на реле или конечный транзистор (выключатель), что приводит к отключению подачи электрического тока.
Поэтому основное предназначение данного прибора – это измерять перемещение части оборудования. И при превышении пределов проходимости отключать его. При этом у датчиков есть свои пределы перемещения, которые варьируются в диапазоне от 1 микрона до 20 миллиметров. Кстати, именно поэтому этот прибор называют и индуктивным датчиком положения.
Достоинства и недостатки
Начнем с достоинств:
- Простота конструкции, достаточно высокая его надежность. Полное отсутствие скользящих контактов, которые быстро выходят из строя.
- Можно использовать для подключения в электрические сети с промышленной частотой.
- Высокая чувствительность.
- Может выдерживать большую выходную мощность.
 Устройство индуктивного датчика
Устройство индуктивного датчика
- Напряжение и точность работы датчика взаимосвязаны, поэтому нестабильное напряжение в сети становится причиной разброса пределов реагирования.
Параметры индуктивного датчика
Один из параметров уже описывался выше – это диапазон срабатывания. Хотя, как утверждают специалисты, он не является важным, но именно по нему и делают выбор. Все дело в том, что в паспорте изделия указываются номинальные параметры напряжения при работе прибора в температурном режиме +20С. Постоянное напряжение составляет 24 вольт, переменное – 230 вольт. Как вы понимаете, в таких условиях индукционный датчик обычно не работает, а если и работает, то редко. При этом в качестве объекта, который будет изменять индуктивность катушки прибора, должна выступать стальная пластина, ее ширина должна быть равна трем диапазонам срабатывания и толщиною 1 мм.
На практике же за основу выбора берут два показателя диапазона срабатывания:
- Эффективный.
- Полезный.
Показания первого отличаются от номинального параметра в пределах ±10%. При этом температурный диапазон расширяется от +18С до +28С. Второй определяется, как ±10% от первого при температурном режиме от 25 до 70С. И если при первом параметре используется номинальное напряжение в сети, то при втором присутствует разброс от 85% до 110% от номинала.
Есть еще один параметр, который связан с зоной срабатывания. Это гарантированный предел. Его нижняя часть равна «0», а верхняя 81% от номинального диапазона.

Необходимо учитывать и такие параметры, как гистерезис и повторяемость. Что такое гистерезис в этом случае? По сути, это расстояние между дальними позициями срабатывания датчика. Оптимальное его значение – это 20% от эффективного диапазона срабатывания.
Не последнее значение имеет и материал, из которого изготавливается объект слежения (перемещения). Оптимальный вариант – сталь 37, ее коэффициент редукции равен «1». Все остальные металлы имеют меньший коэффициент. К примеру, нержавейка – 0,85, медь – 0,3. Как понять, на что влияет коэффициент редукции? Для примера возьмем медную пластину. То есть, получается так, что диапазон срабатывания будет равно 0,3, умноженному на полезный диапазон срабатывания. Достаточно низкий показатель.
Перечислим и другие не столь важные параметры6
- Постоянное напряжение имеет диапазоны: 10-30, 10-60, 5-60 вольт. Переменное 98-253 вольт.
Внимание! Производители сегодня предлагают так называемые универсальные индукционные датчики, которые могут работать и от сети переменного тока, и от сети постоянного.
Способ подключения
Существует несколько разновидностей индуктивных датчиков, которые имеют разное количество проводов подключения.
- Двухпроводные. Включаются прямо в цепь токовой нагрузки. Самый простой вариант, но очень капризный. Для него нужен номинальное сопротивление нагрузке. Если он снижается или увеличивается, прибор начинает работать некорректно. При подключении к сети постоянного тока, необходимо соблюдать полярность.
- Трехпроводной. Это самые распространенные индукционные датчики, в которых два провода подключаются к напряжению, один к нагрузке.
- Четырех-, пятипроводные. В них два провода подключаются к нагрузке. Пятый провод – это возможность выбора режима работы.
Цветовая маркировка выводов
Все, что связано с электрическими сетями, особенно проводниками, обязательно обозначается цветовой маркировкой. Делается это для удобства проведения монтажа и обслуживания. Индуктивный датчик этого также не избежал. В нем выходы обозначены определенными стандартными цветами:
- Минус – синий цвет.
- Плюс – красный.
- Выход – черный.
- Бывает и второй выход, он белого цвета, который может быть и входом в систему управления. Об этом производитель обязательно информирует в инструкции.
 Разновидности индукционных датчиков
Разновидности индукционных датчиков
И последнее – это конструктивные особенности, которые касаются корпуса датчика. Он может иметь цилиндрическую или прямоугольную форму. Изготавливается из металлических сплавов или пластика. Чаще всего в промышленности используются цилиндрические приборы диаметром 12 или 18 мм. Хотя есть в этой размерной линейке и другие параметры: 4, 8, 22 и 30 мм.
Индуктивные датчики. Виды. Устройство. Параметры и применение
Индуктивные датчики – преобразователи параметров. Их работа заключается в изменении индуктивности путем изменения магнитного сопротивления датчика.
Большую популярность индуктивные датчики получили на производстве для измерения перемещений в интервале от 1 микрометра до 20 мм. Индуктивный датчик можно применять для замера уровней жидкости, газообразных веществ, давлений, различных сил. В этих случаях диагностируемый параметр преобразуется чувствительными компонентами в перемещение, далее эта величина поступает на индуктивный преобразователь.
Для замера давления применяются чувствительные элементы. Они играют роль датчиков приближения, предназначенные для выявления разных объектов бесконтактным методом.
Виды и устройство
Индуктивные датчики разделяются по схеме построения на 2 вида:
- Одинарные датчики.
- Дифференциальные датчики.
Первый вид модели имеет одну ветвь измерения, в отличие от дифференциального датчика, у которого две измерительные ветви.
В дифференциальной модели при изменении диагностируемого параметра изменяются индуктивности 2-х катушек. При этом изменение осуществляется на одинаковое значение с противоположным знаком.
Индуктивность катушки вычисляется по формуле: L = WΦ/I
Где W– количество витков; Ф – магнитный поток; I – сила тока, протекающего по катушке. Сила тока взаимосвязана с магнитодвижущей силой следующим отношением: I = Hl/W
Из этой формулы получаем: L = W²/Rm
Где R m = H*L/Ф – магнитное сопротивление.
Работа одинарного датчика заключается в свойстве дросселя, изменять индуктивность при увеличении или уменьшении воздушного промежутка.

Конструкция датчика включает в себя ярмо (1), витки обмотки (2), якорь (3), который фиксируется пружинами. По сопротивлению поступает переменный ток на обмотку. Сила тока в нагрузочной цепи вычисляется:

L – индуктивность датчика, rd – активное дроссельное сопротивление. Оно является постоянной величиной, поэтому изменение силы тока I может осуществляться только путем изменения составляющей индуктивности XL=IRн, зависящей от размера воздушного промежутка δ.
Каждой величине зазора соответствует некоторое значение тока, определяющего падение напряжения на резисторе Rн: Uвых=I*Rн – является сигналом выхода датчика. Можно определить следующую зависимость U вых = f (δ), при одном условии, что зазор очень незначительный и потоки рассеивания можно не учитывать, как и магнитное сопротивление металла Rмж в сравнении с магнитным сопротивлением зазора воздуха Rмв.
Окончательно получается выражение:

На практике активное сопротивление цепи несравнимо ниже индуктивного. Поэтому формула принимает вид:

Из недостатков одинарных можно отметить:
- При эксплуатации датчика на якорь воздействует сила притяжения к сердечнику. Эта сила не уравновешена никакими методами, поэтому она снижает точность функционирования датчика, и вносит некоторый процент погрешности.
- Сила нагрузочного тока зависит от амплитуды напряжения и ее частоты.
- Чтобы измерить перемещение в двух направлениях, нужно установить первоначальное значение зазора, что доставляет определенные неудобства.
Дифференциальные индуктивные датчики объединяют в себе два нереверсивных датчика и изготавливаются в виде некоторой системы, которая состоит из 2-х магнитопроводов, имеющих два отдельных источника напряжения. Для этого чаще всего применяется разделительный трансформатор (5). 
Дифференциальные датчики классифицируются по форме сердечника:
- Индуктивные датчики с Ш-образной формой магнитопровода, выполненного в виде листов электротехнической стали. При частоте более 1 килогерца для сердечника используют пермаллой.
- Цилиндрические индуктивные датчики с круглым магнитопроводом.
Форму датчика выбирают в зависимости от конструкции и ее сочетания с механизмом. Использование магнитопровода Ш-образной формы является удобным для сборки катушки и снижения габаритных размеров индуктивного датчика.
Для функционирования дифференциального датчика применяют питание от трансформатора (5), который имеет вывод от средней точки. Между этим выводом и общим проводом катушек подключают прибор (4). При этом воздушный промежуток находится в пределах от 0,2 до 0,5 мм.
При расположении якоря в средней позиции при равных промежутках индуктивные сопротивления обмоток (3 и 3′) равны. Значит, значения токов катушек также одинаковы, и общий полученный ток в устройстве равен нулю.
При малом отклонении якоря в любую сторону изменяется значение воздушных промежутков и индуктивностей. Поэтому прибор определяет ток разности I1-I2, который определен функцией перемещения якоря от средней позиции. Разность токов чаще всего определяется магнитоэлектрическим устройством (4), выполненным по типу микроамперметра со схемой выпрямления (В) на входе.
Полярность тока не зависит от изменения общего сопротивления катушек. При применении фазочувствительных схем выпрямления можно определить направление перемещения якоря от средней позиции.
Параметры
- Одним из параметров индуктивных датчиков является диапазон срабатывания . По этому параметру выбирают датчики, однако он не настолько важен. В инструкции по датчику даны номинальные параметры питания при эксплуатации устройства при температуре +20 градусов. Постоянное напряжение для датчика – 24 В, а переменное 230 В. Обычно датчик работает в совершенно других условиях.
- На практике при подборе датчика важны два показателя интервала срабатывания:
Показания первого вычисляются как +10% от 2-го при температуре 25-70 градусов. Показания 2-го отличаются от номинала на 10%. Интервал температуры при этом увеличивается с 18 до 28 градусов. Если при втором параметре применяется номинальное напряжение, то при первом есть разброс 85-110%.
- Другим параметром является гарантированный предел срабатывания . Он колеблется от нуля до 81% от номинала.
- Также следует учитывать параметры: повторяемость и гистерезис , который равен расстоянию между конечными позициями работы датчика. Его оптимальная величина равна 20% от эффективного интервала срабатывания.
- Нагрузочный ток . Изготовители иногда производят датчики специального исполнения на 500 миллиампер.
- Частота отклика . Этот параметр определяет наибольшую величину возможности переключения в герцах. Основные промышленные датчики имеют частоту отклика 1000 герц.
Методы подключения на схемах
Имеется несколько видов индуктивных датчиков с различным числом проводов для подключения. Рассмотрим основные виды подключений разных индуктивных датчиков.

- Двухпроводные индуктивные датчики подключаются непосредственно в нагрузочную цепь. Это наиболее простой способ, однако в нем есть особенности. Для такого способа для нагрузки требуется номинальное сопротивление. Если это сопротивление будет больше или меньше, то устройство функционирует некорректно. При включении датчика на постоянный ток нельзя забывать о полярности выводов.
- Трехпроводные индуктивные датчики наиболее популярны. В них имеется два проводника для подключения питания, а один для нагрузки.
- Четырехпроводные и пятипроводные индуктивные датчики. У них два провода на питание, другие два на нагрузку, пятый проводник для выбора режима эксплуатации.
Цветовая маркировка
Маркировка проводников цветом является очень удобной для осуществления обслуживания и монтажа датчиков. Их выходные проводники промаркированы определенным цветом:
- Минус – синий.
- Плюс – красный.
- Выход – черный цвет.
- Второй проводник выхода – белый цвет.
Погрешности
Погрешность преобразования диагностируемого параметра влияет на способность выдачи информации индуктивным датчиком. Суммарная погрешность состоит из множества различных погрешностей:
- Электромагнитная погрешность является случайной величиной. Она появляется вследствие индуцирования ЭДС в катушке датчика наружными магнитными полями. На производстве возле силовых электрических устройств существуют магнитные поля чаще всего частотой 50 герц.
- Погрешность от температуры также является случайным значением, так как работа большого количества элементов датчика зависит от температуры и является значительной величиной, учитываемой при проектировании датчиков.
- Погрешность магнитной упругости. Она появляется от нестабильности деформаций сердечника при сборке прибора, а также из-за изменения деформаций при работе. Влияние нестабильности напряжений в магнитопроводе образует нестабильность сигнала на выходе.
- Погрешности устройства появляются по причине влияния измеряющей силы на деформации элементов датчика, а также влияния скачка усилия измерения на нестабильность деформации. Также на погрешность влияют люфты и зазоры в подвижных частях конструкции датчика.
Погрешность кабеля образуется от непостоянной величины сопротивления, деформации кабеля и его температуры, наводок электродвижущей силы в кабеле от внешних полей.
Электромагнитные параметры материалов и их свойства со временем меняются. Чаще всего процессы изменения свойств материалов происходят в первые 200 часов после термообработки сердечника магнитопровода. Далее эти свойства остаются теми же, и не влияют на полную погрешность датчика.
экзамен / Индукционные датчики
Индукционные датчики
Индукционные датчики предназначены для преобразования скорости линейных и угловых перемещений в ЭДС. Они относятся к датчикам генераторного типа. Принцип действия индукционных датчиков основан на законе электромагнитной индукции. Выходным сигналом индукционных датчиков является ЭДС, которая пропорциональна скорости изменения магнитного потока, пронизывающего витки катушки. Это изменение происходит за счет перемещения катушки в постоянном магнитном поле или за счет вращения ферромагнитного индуктора относительно неподвижной катушки.
Основным отличием индукционных датчиков от индуктивных является то, что в них используется постоянное магнитное поле, а не переменное (питание индуктивных датчиков осуществляется от сети переменного тока). Постоянное магнитное поле в индукционных датчиках создается двумя способами: постоянными магнитами или катушкой, обтекаемой постоянным током.
На рис. 6.19, а показана схема датчика с обмоткой W2, размещенной в воздушном зазоре, в котором постоянный магнитный поток Ф создается катушкой W1, включенной на постоянное напряжение. При перемещении катушки в магнитном поле в ней индуцируется ЭДС, пропорциональная скорости перемещения:
г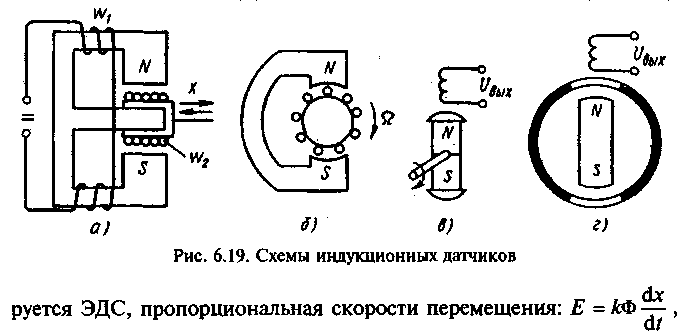 де k — коэффициент пропорциональности, зависящий от числа витков W2 и конструктивных параметров датчика.
де k — коэффициент пропорциональности, зависящий от числа витков W2 и конструктивных параметров датчика.
На рис. 6.19, б показан датчик, в котором постоянный магнитный поток создается с помощью постоянного магнита с полюсными наконечниками. ЭДС, индуцируемая во вращающейся катушке, пропорциональна скорости вращения Ω: 
В обоих этих датчиках катушки подвижны, поэтому для отвода от них выходного сигнала (ЭДС) необходимы гибкие токоподводы или контактные кольца со щетками.
Индукционный датчик может быть выполнен и другой конструкции: с неподвижной катушкой и вращающимся постоянным магнитом (рис. 6.19, в). Надежность при этом повышается за счет отсутствия скользящего контакта. Возможен и другой способ повышения надежности датчика по схеме рис. 6.19, б: и катушка, и постоянный магнит неподвижны, а в зазоре между ними вращается ферромагнитное кольцо с вырезами (рис. 6.19, г) или иной элемент, имеющий существенно разную магнитную проводимость по взаимно перпендикулярным осям. При вращении изменяется поток, пронизывающий плоскость катушки.
В датчиках (рис. 6.19, б, в, г) в качестве выходного сигнала можно использовать частоту ЭДС. Принцип их действия по существу такой же, как у синхронных генераторов. Для измерения частоты вращения используются и специальные электрические машины малой мощности — тахогенераторы.
Тахогенератор постоянного тока имеет обмотку возбуждения, создающую при питании постоянным током магнитный поток Ф. При вращении якоря в нем создается ЭДС, пропорциональная частоте вращения п: Е= кФп, где k — постоянная, определяемая конструкцией.
Частота вращения п обычно выражается в 1/мин (количество оборотов в минуту) и связана со скоростью вращения  выражением:
выражением: 
С помощью коллектора и щеток выходной сигнал подается на нагрузку в виде выпрямленного напряжения.
Тахогенератор переменного тока имеет на статоре две обмотки, сдвинутые одна относительно другой на 90 град. Одна обмотка включается в сеть переменного тока. При вращении ротора, выполненного в виде тонкостенного электропроводящего цилиндра, в другой обмотке наводится переменная ЭДС, которая пропорциональна частоте вращения п. Для повышения температурной стабильности в качестве материала полого ротора используется константан.
Тахогенераторы обладают высокой чувствительностью и мощностью выходного сигнала. Общим недостатком всех генераторных датчиков является зависимость выходного сигнала от сопротивления нагрузки.