Прорывная технология или утопия: линейный генератор + свободнопоршневой двигатель
Линейный генератор со свободным поршнем, который использует сгорание топлива для непосредственной выработки электроэнергии без использования приводного вала, может обеспечить расширение возможностей электромобилей. Он намного меньше и эффективнее, чем обычный двигатель внутреннего сгорания. Несколько научных групп, в том числе научно-исследовательская группа Toyota, исследуют эту интригующую технологию.
Двигатели внутреннего сгорания, скорее всего, сохранятся в течение довольно долгого времени и будут использоваться в качестве компонента подключаемых гибридных автомобилей и электромобилей с увеличенным запасом хода. Все это, несмотря на большое количество совершенных электромобилей.
При этом может быть установлен небольшой бортовой высокоэффективный электрогенератор, чтобы аккумулятор можно было заряжать во время поездки — так называемый «расширитель запаса хода» или, проще говоря, гибридно-электрическая трансмиссия. Это помогает повысить эффективность, а также надежность системы.
Линейный генератор со свободнопоршневым двигателем — это своеобразный преобразователь энергии, который может генерировать электрическую энергию, и рассматривается как потенциальная технология для решения проблемы ограниченного пробега электромобилей. Избавившись от кривошипно-шатунного механизма, такой двигатель получает ряд преимуществ в виде переменной степени сжатия, компактных размеров и пр.
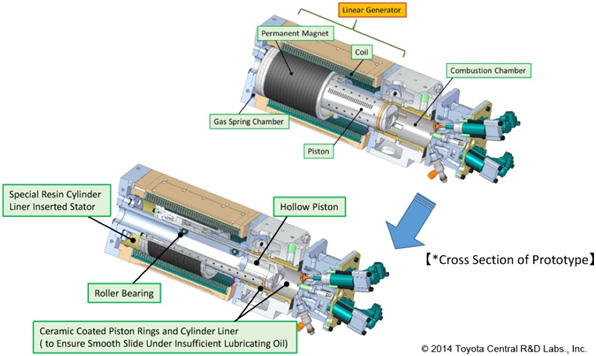
Опытный образец — двухтактный линейный генератор
Оптимальное решение преобразования энергии нашел профессор Питер Ван Блариган. Он оснастил поршень свободнопоршневого двигателя кольцевыми магнитами из неодимового сплава, а на внешней стенке цилиндра-статора поместил обмотку. Таким образом, появление сверхмощных магнитов из неодимового сплава позволило обойтись без механической связи поршня с трансмиссией, создав генератор электричества. Ван Блариган построил опытный образец — двухтактный линейный генератор мощностью 40 кВт. Термический КПД двигателя-генератора, работающего на пропане достигал 56%. Причем, этот двигатель мог работать не только на пропане, но и на бензине, водороде, дизельном топливе и спирте.
Высокий КПД такого двигателя обеспечивается за счет снижения паразитных внутренних потерь. В конструкции отсутствуют вращающиеся массы, которые имеют значительную инерцию. На поршни не действуют боковые силы, которые обычно прижимают их к стенкам цилиндра, благодаря чему уменьшается трение. Подшипники коленчатого вала и шатунов, поршневые пальцы, распределительный вал, кулачки и клапаны — все те узлы классического двигателя, в которых существует трение, — отсутствуют. Кроме того, на каждый цикл работы двигателя со свободным поршнем приходится два рабочих такта. При этом свободнопоршневой двигатель гораздо компактнее, проще и надежнее обычного ДВС. Эффективность преобразования энергии может быть увеличена за счет оптимизации степени сжатия. Кроме того, ключевые характеристики двигателя со свободным поршнем, такие как выходная мощность и эффективность системы могут быть улучшены за счет управления положением поршня.
Все гениальное…
Свободнопоршневой двигатель устраняет всю механическую трансмиссию обычного двигателя, позволяя разрабатывать эффективные циклы сгорания и уменьшая количество деталей и стоимость двигателя.
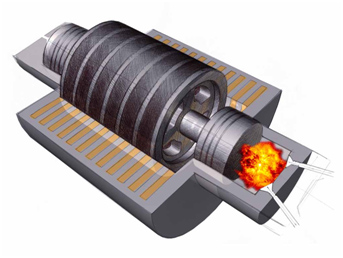
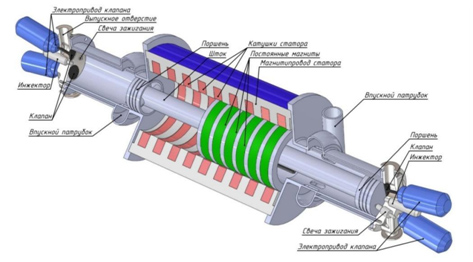
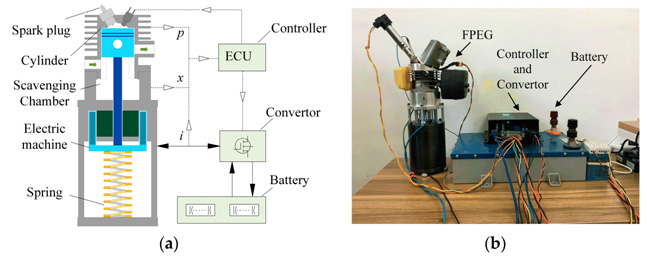
Принцип действия генератора со свободным поршнем, производящим электроэнергию непосредственно из линейного движения поршня без промежуточных механических звеньев достаточно прост. Двухцилиндровый двигатель линейного генератора со свободным поршнем выполнен по оппозитной схеме и имеет поршневую группу, состоящую из двух поршней, соединенных жестким штоком. Циклически повторяющееся давление газов в процессе сгорания топлива сообщает поршневой группе возвратно-поступательное движение. В плоскости симметрии штока, между поршнями на штоке закреплена подвижная магнитная система. Она размещается внутри неподвижного статора с системой обмоток. При возвратно-поступательном движении штока с закрепленной на нем магнитной системой внутри статора вследствие взаимодействия их магнитных полей происходит возникновение электродвижущей силы в обмотках статора.
Кроме того, электрическая машина, работая в режиме двигателя, обеспечивает старт двигателя внутреннего сгорания. Электронная система управления должна осуществлять контроль движения поршней для обеспечения оптимального термодинамического цикла, а также позиционирование поршней, предотвращая их соударение с головками цилиндров.
Преимущества этого принципа преобразования энергии значительны:
- уменьшение числа движущихся деталей за счет исключения кривошипно-шатунного механизма до одного поршневого узла;
- повышение жесткости и механической надежности конструкции двигателя;
- повышение ресурса и механического КПД двигателя вследствие отсутствия шатунов, что приводит к исключению боковых сил, действующих на зеркало цилиндра и уменьшению трения в цилиндропоршневой группе;
- исключение стартера для запуска ДВС, так как электрический генератор может работать и как линейный электродвигатель;
- возможность динамического изменения степени сжатия в каждом такте не механическими способами, а корректировкой параметров электронной системы управления;
- возможность работы с различными видами топлива (бензин, природный газ, водород, биогаз, биотопливо) посредством электронной настройки системы управления;
- реализация оптимальных режимов сгорания топлива, в том числе и гомогенное воспламенение бедных смесей — потенциал для снижения вредных выбросов;
- снижение расходов на производство.
Проблемы сложные, но решаемые
Серийному выпуску подобных двигателей-генераторов мешает несколько проблем, самая главная из которых — создание системы управления. Дело в том, что в обычном ДВС верхняя мертвая точка траектории поршня задается геометрией кривошипно-шатунного механизма, а в линейном она зависит от степени сжатия и скорости сгорания топливовоздушной смеси. То есть, поршень тормозит, создавая давление в камере. Как следствие, длительность тактов и верхняя мертвая точка могут изменяться. А это значит, что при неточной работе форсунки поршень либо остановится, либо ударится в стенку. Как следствие, свободные поршни нуждаются в специальной системе, которая бы нивелировала разницу в процессе сгорания топлива в каждом из рабочих циклов. Ван Блариган считает, что ключ к решению проблемы управления в контроле за положением и движением поршня через внешний статор. Компьютерное управление вполне может справиться с такой задачей. А тормозить поршень можно с помощью тех же электромагнитов.
Полноценный прототип генератора с готовой системой управления обещан с КПД – 50%.
Такой двигатель отлично подходит для автомобиля с элетротрансмиссией. ДВС в таком автомобиле нужен только для зарядки аккумулятора, при пуске он должен сразу выходить на режим максимальной мощности либо максимального момента. Это значит, что нет необходимости обеспечивать его работу на переходных режимах, ту самую, ради которой создаются многоклапанные двигатели, впускные коллекторы переменной длины, управление фазами газораспределения, двойной наддув и прочее. Двигатель, работающий в узком диапазоне оборотов намного проще и, значит, дешевле и надежнее.
Управление решается контроллером итеративного обучения
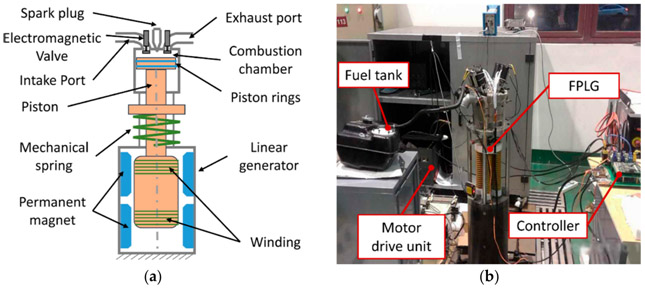
Важной проблемой является стратегия управления возвратно-поступательным движением свободного поршня для обеспечения стабильной работы системы. При отсутствии коленчатого вала несколько поршней должны каким-то образом точно позиционироваться и синхронизироваться. Если движение каждого поршня не контролируется точно, степень сжатия будет меняться, что снижает эффективность работы. Проблема управления была разделена на несколько этапов. Контроллер итеративного обучения был разработан для управления верхним положением, а управление нижним положением было основано на оценке состояний сгорания, при этом управление ходом было основано на конечном автомате. Была решена сложная инженерная задача. Комбинированная имитационная модель, включающая колебания цикла сгорания, была представлена и подтверждена прототипом, а также проанализирована эффективность стратегии управления. Результаты показали, что система обеспечивает стабильную работу, а возвратно-поступательное движение свободного поршня хорошо контролируется.
Задача создания силовой установки, в составе линейного генератора и двигателя внутреннего сгорания со свободным поршнем, представляет собой сложную техническую задачу, решение которой лежит на стыке физики процесса сгорания топлива, теории систем управления быстропротекающими процессами в реальном времени, быстродействующей силовой электроники и техники линейных электроприводов. Однако, к счастью все эти технологии можно считать на сегодняшний день достаточно глубоко разработанными и требуется лишь решить проблему синергетического синтеза систем.
Линейный двигатель



Лине́йный дви́гатель — электродвигатель, у которого один из элементов магнитной системы разомкнут и имеет развёрнутую обмотку, создающую магнитное поле, а другой взаимодействует с ним и выполнен в виде направляющей, обеспечивающей линейное перемещение подвижной части двигателя. Сейчас разработано множество разновидностей (типов) линейных электродвигателей, например, линейные асинхронные электродвигатели (ЛАД), линейные синхронные электродвигатели, линейные электромагнитные двигатели, линейные магнитоэлектрические двигатели, линейные магнитострикционные двигатели, линейные пьезоэлектрические (электрострикционные) двигатели и др. Многие типы линейных двигателей, такие как асинхронные, синхронные или постоянного тока, повторяют по принципу своего действия соответствующие двигатели вращательного движения, в то время как другие типы линейных двигателей (магнитострикционные, пьезоэлектрические и др.) не имеют практического исполнения как двигатели вращательного движения. Неподвижную часть линейного электродвигателя, получающую электроэнергию из сети, называют статором, или первичным элементом, а часть двигателя, получающая энергию от статора, называют вторичным элементом или якорем (название «ротор» к деталям линейного двигателя не применяется, т.к. слово «ротор» буквально означает «вращающийся», а в линейном двигателе вращения нет). Наибольшее распространение в транспорте и для больших линейных перемещений получили асинхронные и синхронные линейные двигатели, но применяются также линейные двигатели постоянного тока и линейные электромагнитные двигатели. Последние чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных тяговых усилий.
Содержание
Асинхронный линейный двигатель
Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать статор и ротор с обмотками обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость. Образовавшаяся плоская конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки статора такого двигателя подключить к сети трехфазного переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления t: V = 2tf. Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведет к появлению силы, действующей, по правилу Ленца, в направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его уже вторичным элементом — под действием этой силы начнет двигаться. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля S = (V — v)/V, где v — скорость движения элемента. Номинальное скольжение линейного двигателя равно 2-6%. [1] Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Одно из достоинств линейного асинхронного двигателя заключается в том, что в качестве вторичного элемента может использоваться обычный металлический лист. Вторичный элемент при этом может располагаться также между двумя статорами, или между статором и ферромагнитным сердечником. Вторичный элемент выполняется из меди, алюминия или стали, причем использование немагнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы. Принцип действия линейных двигателей со вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трехфазного переменного тока. Линейные двигатели очень часто работают в так называемом обращенном режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте. Например, статор неподвижно закреплен под полом вагона, а вторичный элемент представляет собой металлическую полосу между рельс, а иногда вторичным элементом служат сами рельсы. Одной из разновидностей линейных асинхронных двигателей являются трубчатый (коаксиальный) двигатель. Статор такого двигателя имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки (обмотки статора) и металлические шайбы, являющиеся частью магнитопровода. Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуцирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создает на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении. Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
Синхронный линейный двигатель

Основной областью применения синхронных двигателей, где их преимущества проявляются особенно сильно, является высокоскоростной электрический транспорт. Дело в том, что по условиям нормальной эксплуатации такого транспорта необходимо иметь сравнительно большой воздушный зазор между подвижной частью и вторичным элементом. Асинхронный линейный двигатель имеет при этом очень низкий коэффициент мощности (cosφ), и его применение оказывается экономически невыгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с cosφ, близким к единице, и высоким КПД, достигающем 96%. Применение синхронных линейных двигателей в высокоскоростном транспорте сочетается, как правило, с магнитной подвеской вагонов и применением сверхпроводящих магнитов и обмоток возбуждения, что позволяет повысить комфортабельность движения и экономические показатели работы подвижного состава.
Применение линейных двигателей
- Широкое применение линейные двигатели нашли в электрическом транспорте, чему способствовал целый ряд преимуществ этих двигателей: прямолинейность движения вторичного элемента (или статора), что естественно сочетается с характером движения различных транспортных средств, простота конструкции, отсутствие трущихся частей (энергия магнитного поля непосредственно преобразуется в механическую), что позволяет добиться высокой надежности и КПД. Еще одно преимущество связано с независимостью силы тяги от силы сцепления колес с рельсовым путем, что недостижимо для обычных систем электрической тяги. При использовании линейных двигателей исключается буксование колес электрического транспорта (именно этой причиной был обусловлен выбор линейного двигателя для ММТС), а ускорения и скорости движения средств транспорта могут быть сколь угодно высокими и ограничиваться только комфортабельностью движения, допустимой скоростью качения колес по рельсовому пути и дороге, и динамической устойчивостью ходовой части транспорта и пути.
- Линейные асинхронные двигатели применяются для привода механизмов транспортировки грузов различных изделий. Такой конвейер имеет металлическую ленту, которая проходит внутри статоров линейного двигателя, являясь вторичным элементом. Применение линейного двигателя в этом случае позволяет снизить предварительное натяжение ленты и устранить ее проскальзывание, повысить скорость и надежность работы конвейера.
- Линейный двигатель может применяться для машин ударного действия, например сваезабивных молотов, применяемых при дорожных работах и строительстве. Статор линейного двигателя располагается на стреле молота и может перемещаться по направляющим стрелы в вертикальном направлении с помощью лебедки. Ударная часть молота является одновременно вторичным элементом двигателя. Для подъема ударной части молота двигатель включается таким образом, чтобы бегущее поле было направлено вверх. При подходе ударной части к крайнему верхнему положению двигатель отключается и ударная часть опускается вниз на сваю под действием силы тяжести. В некоторых случаях двигатель не отключается, а реверсируется, что позволяет увеличить энергию удара. По мере заглубления сваи статор двигателя перемещается вниз с помощью лебедки. Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.
- Разновидностью линейного двигателя можно считать магнитогидродинамический насос. Такие насосы применяются для перекачки электропроводящих жидкостей и в том числе жидких металлов, и широко применяются в металлургии для транспортировки, дозировки и перемешивания жидкого металла, а также на атомных электростанциях для перекачки жидкометаллического теплоносителя. Магнитогидродинамические насосы могут быть постоянного или переменного тока. Для насоса постоянного тока первичным элементом — статором двигателя постоянного тока — является С-образный электромагнит. В воздушный зазор электромагнита помещается трубопровод с жидким металлом. С помощью электродов, приваренных к стенкам трубопровода, через жидкий металл пропускается постоянный ток от внешнего источника. Часто обмотка возбуждения включается последовательно в цепь электродов. При возбуждении электромагнита на металл в зоне прохождения постоянного тока начинает действовать электромагнитная сила аналогично тому, как она действовала на проводник с током, помещенным в магнитное поле. Под действием этой силы металл начнет перемещаться по трубопроводу. Преимуществами МГД-насосов являются отсутствие движущихся механических частей и возможность герметизации канала транспортировки металла. [2]
Линейные двигатели высокого и низкого ускорения
Все линейные двигатели их можно разделить на две категории:
- двигатели низкого ускорения
- двигатели высокого ускорения
Двигатели низкого ускорения используются в общественном транспорте (маглев, монорельс, метрополитен) как тяговые, а также в станках (лазерных, водорезных, сверлильно-фрезерных) и другом технологическом оборудовании в промышленности. Двигатели высокого ускорения весьма небольшие по длине, и обычно применяются, чтобы разогнать объект до высокой скорости, а затем выпустить его (см. пушка Гаусса). Они часто используются для исследований гиперскоростных столкновений, а также в специальных устройствах, таких, как оружие [источник не указан 308 дней] или пусковые установки космических кораблей [каких?] .
Линейные двигатели широко используются также в приводах подачи металлорежущих станков и в робототехнике. Для повышения точности позиционирования часто используются линейные датчики положения.
Линейные двигатели
Применение линейных двигателей имеет следующие преимущества перед схемами с серводвигателями: точность позиционирования; возможны сверхмалые подачи (микроны); высокая скорость (свыше 3 м/с); высокое ускорение (80 м/с 2 ); отсутствие мертвого хода; низкий уровень шума даже при максимальной скорости; возможность реализации малых рабочих ходов; отсутствуют упругие деформации элементов привода (зубчатый ремень, винт ШВП); длительный срок службы и надежность. К недостаткам следует отнести: высокие требования к точности изготовления элементов машины; наличие системы охлаждения; высокая стоимость.
В состав типовой сервосистемы на основе линейного двигателя (рис. 1) входят: линейный двигатель, состоящий из первичной и вторичной секций; блок управления (на рисунке не показан); рабочий стол; направляющие качения; датчик обратной связи; кабелеукладочная цепь; ограничитель хода; буфер.

Для контроля скорости, положения системы и коммутации двигателя используется датчик линейных перемещений. Этот узел преобразует измеряемое перемещение в последовательность электрических сигналов, содержащих информацию о величине и направлении этих перемещений. Преобразователь состоит из измерительной головки и линейки, при этом между ними отсутствует механический контакт. Как правило, это оптоэлектрические датчики, но также могут использоваться магнитные и индукционные системы.
Линейный двигатель, как и вращающийся, состоит из двух частей: первичной и вторичной секций. Первичная секция соответствует статору вращающегося двигателя. Она включает в себя шихтованный магнитопровод с трехфазной обмоткой и температурный датчик. Вторичная секция представляет собой ротор, состоящий из стального несущего каркаса с прикрепленными к нему постоянными магнитами. Первичная и вторичная секции заключены в оболочки.
Условно говоря, линейный двигатель (рис.2) представляет собой вращающийся двигатель, который разрезан и «развернут» в плоское состояние. Соответственно, принципы работы остаются неизменными. Однако, в линейном двигателе движение совершает первичная секция (обмотка) при неподвижной вторичной секции (роторе).

Движущее магнитное поле генерируется обмоткой первичной секции. Поля вторичной секции и результирующее магнитное поле первичной секции создают движение в соответствующем направлении посредством создания тягового усилия. Положение результирующего вектора определяется фазами токов инвертора, а амплитуда вектора, и, следовательно, развиваемое мотором усилие, задается амплитудами фазных токов.
Для нормальной работы линейного двигателя необходимо точно выдержать воздушный зазор между первичной и вторичной секциями. При увеличении зазора уменьшается нагрузочная способность двигателя. В связи с этим повышаются требования к точности исполнения монтажных поверхностей. На величину и точность воздушного зазора влияют направляющие прямолинейного движения и рабочий стол.
Как и серводвигатель, линейный двигатель управляется блоком управления. Модель блока управления определяется выбранным типом линейного двигателя.
На одной оси могут быть установлены две первичных секции, работающие параллельно от одного блока управления. Эти секции должны быть одного типоразмера с одинаковым типом обмотки. При этом расстояние между первичными секциями определяется требуемыми позициями электрических фаз. Допустимые компоновки секций и расстояния между ними приводятся в документации на двигатель.
Критическим местом для линейных двигателей является температурный режим. Производители предлагают линейные двигатели с воздушным и водяным (масляным) охлаждением. Это может быть один и тот же двигатель, работающий в разных режимах.
Конвекционное охлаждение значительно упрощает конструкцию машины, однако, при этом существенно снижается номинальное тяговое усилие (≈ в 2 раза). Максимальное усилие двигателя остается прежним. На рис. 3 представлена простейшая схема водяного охлаждения. Естественно, наличие охлаждения делает конструкцию всей машины в целом сложнее.

Стремясь улучшить охлаждение двигателя, производители вводят в его конструкцию дополнительные охлаждающие элементы. На рис. 4 (а) приведена конструкция первичной секции двигателя фирмы Sew-Eurodrive с воздушным охлаждением, в которой применен вентилятор. На рис. 4 (б) представлен линейный двигатель фирмы Siemens с дополнительным водяным радиатором направленного охлаждения первичной и контуром охлаждения вторичной секций.

Для предотвращения перегрева линейный двигатель оснащается датчиком температуры. Датчик отключает двигатель при температуре обмотки ≈ 120ºС.
К основным характеристикам линейного двигателя относят: номинальное тяговое усилие FN, H; максимальное тяговое усилие Fmax, H; максимальная скорость Vmax, м/с; сила магнитного притяжения первичной секции – длина L, мм и ширина B, мм. На рис.5 представлена типовая зависимость тягового усилия от линейной скорости. Номинальное усилие FN, задающее область работы с постоянной нагрузкой, определяется температурным режимом. С максимальным усилием двигатель может работать ограниченное время и не во всем диапазоне скоростей.

В таблице 1 приведены данные о характеристиках линейных двигателей от различных производителей. Номинальное тяговое усилие приводится при воздушном и водяном охлаждения (разделены знаком «/»). Естественно, все модели не могут быть представлены в одной таблице. Полные каталоги предоставляются производителями или их дилерами.
Таблица 1. Характеристики линейных двигателей
Mitsubishi(тип HALM 12, 14)
Sew-Eurodrive (тип SL2-Basic)
Siemens (тип 1FN3)
Электропривод с линейными двигателями

 Подавляющее большинство электродвигателей является электродвигателями вращательного движения. В то же время многие рабочие органы производственных машин должны по технологии своей работы осуществлять поступательное (например, конвейеры, транспортеры и др.) или возвратно-поступательное движение (механизмы подачи станков, манипуляторы, поршневые и другие машины).
Подавляющее большинство электродвигателей является электродвигателями вращательного движения. В то же время многие рабочие органы производственных машин должны по технологии своей работы осуществлять поступательное (например, конвейеры, транспортеры и др.) или возвратно-поступательное движение (механизмы подачи станков, манипуляторы, поршневые и другие машины).
Преобразование вращательного движения в поступательное осуществляется посредством специальных кинематических звеньев: винт-гайка, шарико-винтовая передача, шестерня-зубчатая рейка, кривошипно-шатунная передача и другие.
Естественным для конструкторов рабочих машин является желание использовать для привода рабочих органов, совершающих поступательное и возвратно-поступательное движение, двигателей, ротор которых движется линейно.
В настоящее время получают развитие электроприводы, использующие линейные асинхронные, вентильные и шаговые двигатели. Принципиально линейный двигатель любого типа может быть образован из двигателя вращательного движения путем линейной развертки цилиндрического статора в плоскость.
Представление об устройстве линейного асинхронного двигателя можно получить, если развернуть статор асинхронного двигателя в плоскость. При этом вектор намагничивающих сил статора будет линейно перемещаться вдоль развертки статора, т.е. при этом образуется не вращающееся (как в обычных двигателях), а бегущее электромагнитное поле статора.
В качестве вторичного элемента может использоваться ферромагнитная полоса, располагаемая с небольшим воздушным зазором вдоль развертки статора. Эта полоса играет роль короткозамкнутого ротора. Вторичный элемент увлекается движущимся полем статора и линейно перемещается со скоростью, меньшей скорости движения поля статора на величину линейного абсолютного скольжения.
Линейная скорость бегущего электромагнитного поля будет
где τ, м — полюсное деление — расстояние между соседними полюсами линейного асинхронного двигателя.
Скорость вторичного элемента

где sЛ — относительное линейное скольжение.
При питании двигателя напряжением стандартной частоты получаемые скорости поля будут достаточно велики (более 3 м/с), что затрудняет использование этих двигателей для привода промышленных механизмов. Такие двигатели применяются для высокоскоростных транспортных механизмов. Для получения более низких скоростей движения и регулирования скорости линейного асинхронного двигателя его обмотки питают от преобразователя частоты.
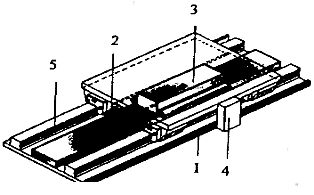
Рис. 1. Конструкция линейного однокоординатного двигателя.
Применяются несколько вариантов конструкций линейного асинхронного двигателя. Одна из них показана на рис. 1. Здесь вторичный элемент (2) — полоса, соединенный с рабочим органом, перемещается по направляющим 1 под действием бегущего электромагнитного поля, создаваемого статором 3. Такая конструкция удобна для компоновки с рабочей машинной, однако, она сопряжена со значительными потоками рассеяния поля статора, вследствие чего cosφ двигателя будет низким.
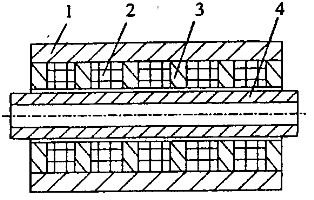
Рис.2. Линейный двигатель цилиндрической конструкции
Для увеличения электромагнитной связи между статором и вторичным элементом, последний размещают в прорезь между двумя статорами, либо конструкция двигателя выполняется в виде цилиндра (см. рис. 2). В этом случае статор двигателя представляет собой трубку (1), внутри которой расположены цилиндрические наборные катушки (2), являющиеся обмоткой статора. Между катушками размещены ферромагнитные шайбы 3, являющиеся частью магнитопровода. Вторичный элемент — шток трубчатой формы также выполнен из ферромагнитного материала.
Линейные асинхронные двигатели могут также иметь обращенную конструкцию, когда вторичный элемент неподвижен, а перемещается статор. Такие двигатели обычно применяются на транспортных средствах. В этом случае в качестве вторичного элемента используется рельс или специальная полоса, а статор размещается на подвижной тележке.
Недостатком линейных асинхронных двигателей является низкий к.п.д и связанные с этим потери энергии, прежде всего, во вторичном элементе (потери скольжения).
В последнее время кроме асинхронных начали применяться синхронные (вентильные) двигатели. Конструкция линейного двигателя такого типа аналогична представленной на рис. 1. Статор двигателя развернут в плоскость, а на вторичном элементе размещаются постоянные магниты. Возможен вариант обращенной конструкции, когда статор является подвижной частью, а вторичный элемент с постоянными магнитами неподвижен. Переключение обмоток статора производится в зависимости от относительного положения магнитов. С этой целью в конструкции предусмотрен датчик положения (4 — на рис. 1).
Для позиционных приводов эффективно применяются также линейные шаговые двигатели. Если развернуть в плоскость статор шагового двигателя, а вторичный элемент выполнить в виде пластины, на которой путем фрезерования канавок образованы зубцы, то при соответствующем переключении обмоток статора вторичный элемент будет совершать дискретное движение, шаг которого может быть весьма малым — до долей миллиметра. Часто применяется обращенная конструкция, в которой вторичный элемент неподвижен.
Скорость линейного шагового двигателя определяется величиной зубцового деления τ, числом фаз m и частотой переключения

Получение высоких скоростей движения не вызывает трудностей, поскольку увеличение зубцового деления и частоты не лимитируется технологическими факторами. Ограничения существуют для минимального значения τ, т.к. отношение зубцового деления к величине зазора между статором и вторичным элементом должно быть не меньше 10.

Использование дискретного привода позволяет не только упростить конструкцию механизмов, совершающих линейное однокоординатное движение, но и дает возможность с помощью одного привода получить двух или многокоординатное движение. Если на статоре подвижной части расположить ортогонально две системы обмоток, а во вторичном элементе выполнить канавки в двух перпендикулярных направлениях, то подвижный элемент будет совершать дискретное движение в двух координатах, т.е. обеспечивать перемещение на плоскости.
В этом случае возникает задача создания опоры для подвижного элемента. Для ее решения может использоваться воздушная подушка — напор воздуха, подаваемого в пространстве под подвижным элементам. Линейные шаговые двигатели развивают относительно низкое тяговое усилие и имеют низкий к.п.д. Основной областью их применения являются легкие манипуляторы, легкие сборочные станки, измерительные машины, станки для лазерной резки и другие устройства.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Ранее на эту тему: Электропривод
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Линейные электродвигатели. Основные разновидности и их применение

Назначение и типы линейных электродвигателей
Ротационные электродвигатели обычно предназначены для реализации вращательного движения рабочего механизма. Иногда эти двигатели осуществляют поступательные или возвратно-поступательные движения. Достигается это при помощи кинематических передач усложняющих конструкцию и снижающих коэффициент полезного действия привода. Применение линейных электродвигателей позволяет устранить эти недостатки.
В ротационных электродвигателях индуктор представляет собой цилиндр, внутри которого вращается ротор. В плоских линейных электродвигателях индуктор развернут на плоскости. Индуктор цилиндрического линейного электродвигателя — цилиндр, внутри которого линейно перемещаются вторичные элементы.
Основные типы линейных электродвигателей: линейные асинхронные электродвигатели, линейные синхронные электродвигатели, линейные электродвигатели постоянного тока, линейные шаговые электродвигатели. Наибольшее применение получили линейные асинхронные электродвигатели. Первичная обмотка асинхронного линейного электродвигателя возбуждает бегущее электромагнитное поле. В результате взаимодействия первичного поля и индуктируемых токов во вторичном элементе возникает тяговое усилие. Вторичный элемент прямолинейно перемещается. В линейных асинхронных электродвигателях имеют место ухудшающие характеристики краевые эффекты. Разомкнутость магнитной цепи в продольном направлении вызывает продольный краевой эффект. Увеличение числа полюсов индуктора снижает продольный краевой эффект. Наличие на краях вторичного элемента продольных составляющих токов, не создающих полезное тяговое усилие — поперечный краевой эффект. Увеличение ширины вторичного элемента снижает влияние поперечного краевого эффекта. Итак, принцип действия как ротационных, так и линейных электродвигателей имеет одну и ту же физическую природу.
Применение линейных электродвигателей
Линейные электродвигатели применяются там, где они упрощают конструкцию, повышают производительность машин и оборудования, или в тех случаях, когда использование ротационных электродвигателей по их характеристикам невозможно. Применение линейных электродвигателей наиболее перспективно в промышленном и пассажирском транспорте. В конвейерных поездах индукторы электропривода расположены вдоль рельсового пути, вторичный элемент электродвигателя находится на подвижном составе. Такие поезда удобны при транспортировке угля, руды и строительных материалов. На примере системы городского эстакадного пассажирского транспорта показан другой вариант исполнения линейного электродвигателя, где вторичный элемент установлен вдоль пути в виде токопроводящей вертикальной полосы. А индукторы установлены в движущемся вагоне. Линейные асинхронные электродвигатели широко применяются в приводах различных исполнительных механизмов и устройств. В приводах разъединителей тяговых подстанций цилиндрический линей электродвигатель существенно упрощает конструкцию, повышает быстродействие и эксплуатационную надежность оборудования.
В ряде случаев, вторичным элементом двигателя может быть и деталь рабочего механизма. Привод поворотного стола манипулятора осуществлен на базе плоских линейных электродвигателей, что обеспечивает высокую точность углового позиционирования стола и существенно упрощает механическую часть устройства. В отдельных случаях, линейные асинхронные электродвигатели могут эффективно выполнять сразу несколько целевых функций. Литейная карусельная машина. Ее привод реализован на линейных электродвигателях плоского исполнения. Он может перемещать и при технологической необходимости подогревать из ложницы. Коэффициент полезного действия таких приводов значительно выше, чем КПД приводов с одной целевой функцией.
Принцип работы линейного асинхронного электродвигателя может быть использован при создании других электромагнитных устройств, например в сепараторах цветных металлов. Линейные электродвигатели успешно применяются в различных системах внутрицехового транспорта. Основными преимуществами линейных электродвигателей являются возможность получения непосредственного прямолинейного движения, больших скоростей и ускорений, простота конструкции, бесшумность и надежность работы. Развитие микропроцессорной техники и разработка новых средств управления позволяют постоянно расширять области эффективного применения линейных электродвигателей.