Изучаем что такое энкодеры
Энкодер — это специальный датчик для измерения характеристик вращения каких-либо объектов. Другое название приборов — датчики угла поворота.
Эти устройства фиксируют параметры вращения и преобразуют их в последовательность электрических сигналов. Характеристики этих сигналов определяются значением угла поворота.

Характеристики
Основная характеристика датчиков поворота — разрядность. Разрядность энкодера — это количество импульсов за один оборот. Ее также называют разрешением. Как правило, разрешение составляет 1024 за один оборот.
Другие конструктивные и функциональные особенности этих приборов:
- тип вала — пустой или с прямой осью;
- размеры отверстия и вала;
- рабочее напряжение;
- размеры корпуса прибора;
- способы выхода;
- разрядность (количество бит);
- сигнал на выходе;
- есть энкодер с кнопкой;
- длина кабеля и тип разъема;
- способ крепления.
Где применяют энкодеры
На вопрос, что это за устройство такое — энкодер, можно ответить перечислением того, где используют данные приборы. Сферы применения угловых датчиков зависят от их сложности и способности выдерживать нагрузки.
Датчики поворота используют наиболее часто на станкостроительных заводах, в системах точного перемещения, робототехнических комплексах, в измерительных устройствах, где требуется точная фиксация поворотов, наклонов, вращений.

В промышленности и сложных механизмах, используют высокопроизводительные энкодеры, устойчивые к тепловому воздействию и взрывам.
Другие области и механизмы, в которых применяют эти датчики:
- в печатной промышленности: устройства устанавливают на валах, по которым движется бумага;
- в автомобилестроении: с их помощью определяют угол поворота колес (иногда взаимодействуют с движками);
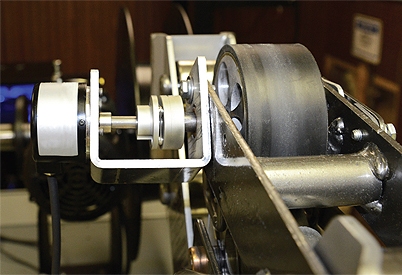
- на металлообрабатывающих предприятиях для контроля вращения валов с металлическими лентами;
- в химической и пищевой промышленности: на оборудовании автоматизированной фасовки;
- в электротехнике.
Пример использования прибора есть почти в каждом современном доме. Это обычная компьютерная мышь, в которой также установлен такой датчик.

Общие плюсы и минусы
Прежде, чем рассмотреть разные типы энкодеров, стоит сказать об общих преимуществах и недостатках этих датчиков.
- Доступная цена.
- Простой монтаж и использование.
- Высокая точность измерений.
- Универсальность — возможность применения на широком спектре приборов и оборудования.
- Возможность определить направление вращения объекта.
- Возможные ошибки в измерениях, если выбран прибор неправильного типа или нарушена технология установки.
- Схема подключения зависит от типа и сферы применения.
- В некоторых видах энкодеров нужно постоянно преобразовывать код Грея.
- Ограниченная разрешающая способность. Чтобы повысить точность измерений, нужно добавлять дополнительные каналы.
Типы приборов
Устройства бывают нескольких типов. Типы энкодеров: инкрементальные и абсолютные, оптические и механические. Далее будет рассмотрено, что такое энкодер инкрементального типа, а затем обозрены другие типы.
Инкрементальные энкодеры
Они распространены больше всего. В инкрементальном варианте вращательное движение вала преобразовывается в электрические импульсы. Его конструкция состоит из диска с прорезями и оптических датчиков.
Конструкция датчиков поворота данного типа, не позволяет им сообщать свое абсолютное состояние, а только величину изменения положения. Простой образец инкрементального устройства — шайба регулировки громкости автомобильной магнитолы.

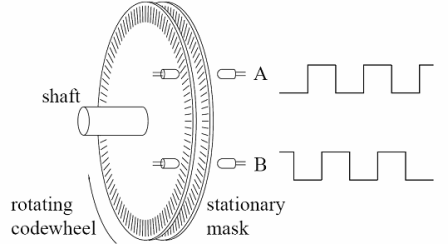
Этот вид работает следующим образом. У него есть начальная нуль-метка, или выход Z, и два дополнительных выхода — A и B. Датчик создает две линии сигналов со смещенными на четверть фазы импульсами относительно друг друга. Разница импульсов указывает на направление вращения, а их количество — на угол поворота.

Разновидность инкрементальных энкодеров — сдвоенные, или квадратурные. Они состоят из двух датчиков, которые срабатывают со смещением в полшага. Квадратурные считают количество импульсов и учитывают направление.
У инкрементальных два главных минуса. Во-первых, нужно постоянно обрабатывать и анализировать сигнал, для чего используют контроллер и специальную программу. Во-вторых, они требуют синхронизации с нулевой меткой после включения. Для этого требуется инициализация для поиска выхода Z.
Абсолютные энкодеры
Датчики такого типа устроены более сложно. Но они позволяют определить величину угла поворота сразу после включения, не требуя синхронизации с нулевой меткой.
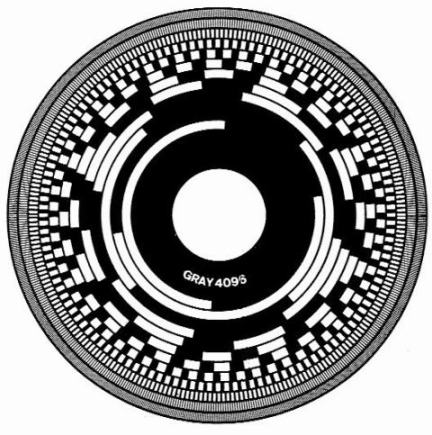
В основе конструкции поворотный круг, разделенный на одинаковые по размеру пронумерованные секторы. После включения устройства определяется номер сектора, на котором оно находится. Такое решение позволяет сразу зафиксировать положение, угол и направление вращения.

Принцип работы абсолютного энкодера основан на использовании кода Грея для определения текущего положения и других параметров. В них не требуется синхронизация с нулевым значением.
Единственный существенный недостаток этого типа угловых датчиков — необходимость все время переводить код Грея в двоичный код для регистрации положения датчика.
Многооборотные датчики поворота
Абсолютные энкодеры могут быть однооборотными и многооборотными.
Однооборотные показывают абсолютное значение после одного оборота. После этого код возвращается к начальному значению. Такие датчики используют в основном для измерения угла поворота.
Если нужно измерять обороты в системах с линейным перемещением, используют многооборотные энкодеры. В них есть дополнительный передаточный механизм, благодаря чему они регистрируют, помимо угла поворота, количество оборотов.
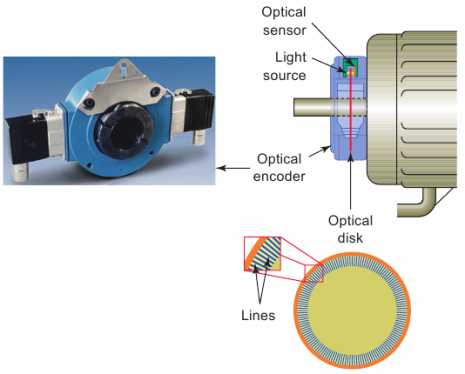
Оптические энкодеры
Диск оптического энкодера изготавливают из стекла. Отличие этого типа угловых датчиков, в наличии оптического растора, перемещающегося при вращении вала. При этом он создает поток света, который регистрирует фотодатчик.

Каждому положению энкодера соответствует определенный цифровой код, который вместе с количеством оборотов составляет единицу измерения устройства.
Оптические угловые датчики бывают фотоэлектрическими и магнитными.
В основе работающих датчиков лежит магнитный эффект Холла. Их точность и разрешение ниже, однако, и конструкция проще. Они лучше переносят сложные условия работы и занимают меньше места.
Фотоэлектрические датчики основаны на том же принципе. В них свет преобразуется в электрические сигналы.
Механические энкодеры
Также называются аналоговыми. Их диск изготавливают из диэлектрика и наносят на него выпуклые или непрозрачные области. Набор контактов и переключателей, позволяет вычислить значение абсолютного угла. Механические энкодеры также используют код Грея.
Один из недостатков этих энкодеров в том, что со временем контакты разбалтываются. В результате сигнал искажается, и прибор выдает неточные значения. А это сказывается на общей работоспособности. Оптические и магнитные энкодеры не имеют такого недостатка.
Монтаж и подключение датчиков поворота
Как правило, энкодеры устанавливают на валах, с которых нужно считывать информацию. Чтобы компенсировать различия в размерах, используют переходные муфты. Важно прочно закрепить корпус датчика при монтаже.
Чаще всего угловые энкодеры работают вместе с контроллерами. Преобразователь подключают к нужным выходам. Затем программа определяет положение объекта в текущий момент, его скорость и ускорение.

Варианты подключения
В самом простом варианте, энкодер подключают к счетчику, запрограммированному измерять скорость.
Однако чаще работа энкодера осуществляется вместе с контроллером. Примером служат датчики поворота на валах двигателей, совмещающих какие-либо детали между собой. С помощью вычислений на основе поступающих данных, система отслеживает зазор между деталями. Когда достигнуто некоторое минимальное значение, совмещение деталей останавливается, чтобы их не повредить.
Другой случай — подключение энкодеров на двигателях с частотными преобразователями, где они служат элементами обратной связи. Здесь принцип того, как подключить устройство, еще проще. Датчик угла поворота подключается к ним с помощью платы сопряжения. Это позволяет точно поддерживать скорость и момент двигателя.
При использовании самодельного энкодера, сделанного своими руками, способ подключения может быть другим. Желательно проверить оба перечисленных варианта, доведя устройство до исправной работы.
После подключения желательно проверить все мультиметром.
Видео по теме
Принцип работы энкодера, как он устроен и как работает
Что это такое и где применяется
Энкодер (ДУП) – это специальное устройство, необходимое для точного измерения интересующих параметров движения детали цифровым способом (угол поворота/направление/скорость и позиция), к примеру, редуктора или вала на электродвигателе. Стоит отметить, что данное устройство может носить название преобразователя угловых помещений.
Своё применение энкодер нашёл в разных системах точных перемещений, в промышленности (станкостроительные заводы); в роботостроении, измерительных устройствах, для которых важен точный учёт измерений вращения, поворота, наклона и угла. Также их применяют в таких сферах как: автомобилестроение и компьютерная техника.
Принцип работы энкодера заключается в его передаче сигнала на вращающийся объект. При этом он позволяет увидеть такие данные как: угол поворота/направление/скорость и позиция.
Устройство и виды энкодеров

Рисунок 1. Энкодер с ручкой — самый простой вариант
Как вы уже узнали, энкодер – это поворотный датчик. Самый простой датчик оснащён ручкой, способной совершать поворот, как по стрелке часов, так и против неё. От поворотного угла и направления зависит выдаваемый цифровой сигнал, который информирует либо о том, какое положение приняла ручка, либо её стороне поворота. Обычно у таких энкодеров ручка применяется ещё в виде кнопки.
Датчики поворотного угла подразделяют по следующим критериям:
- Принцип выдачи данных: инкрементный и абсолютный;
- Принцип работы: оптический, магнитный и механический;
Инкрементальный энкодер принцип работы

Рисунок 2. Инкрементный энкодер
Имея более простую конструкцию, преобразователь формирует импульсы, благодаря которым устройство приёма информации определяет нынешнее положение объекта, подсчитывая счётчиком число импульсов. Сразу после приведения данного вида ДУПа в действие положение интересующего объекта (вала) неизвестно. Для подключения системы отсчёта непосредственно к отсчётному началу такие датчики оснащены нулевой меткой. Через них валу необходимо пройти после соответствующего включения устройства.
Из недостатков данного вида датчиков можно выделить то, что определить пропуск импульсов от преобразователя не представляется возможным. Это соответственно является причиной накопления ошибки при выявлении поворотного угла объекта (пока он не пройдёт нуль-метку). Для выявления направления поворота используется пара измерительных каналов – косинусный и синусный. В них одинаковые импульсные последовательности перемещены ровно на 90 градусов относительно обоих каналов.
Абсолютный энкодер устройство

Рисунок 3. Абсолютный энкодер
У этого типа ДУПа его поворотный круг поделён на определённые пронумерованные сектора, обычно идентичного размера. Во время работы он выдаёт конкретный секторный номер, в котором он непосредственно и находится. Именно поэтому данное устройство называют абсолютным. Благодаря его устройству можно легко определить угол/положение/направление энкодера относительно начального (нулевого) сектора.
Помимо этого абсолютный датчик угла не требует присоединения систем отсчёта к какому-нибудь нулевому значению. В нём используется специальный код Грея, позволяющий не допустить ошибки при работе. Из недостатков можно выделить только то, что микроконтроллер будет вынужден постоянно его переводить в двоичный код, чтобы выяснить положение ДУПа.
Оптические ДУПы
Они отличаются наличием диска из стекла с оптическим растром, закреплённого на валу. Во время вращения вала создаётся поток света, который впоследствии принимается фотодатчиком.
Абсолютный оптический датчик – это ДУП, в котором каждое положение вала имеет свой выходной цифровой код. Этот код является одним из основных параметров устройства. Данный датчик, как и инкрементный, вычисляет и закрепляет параметр движения оптического диска.
Магнитные
Магнитный энкодер регистрирует передвижение движущегося магнитного элемента, а именно его магнитных полюсов рядом с чувствительным элементом, переводя полученные данные в определённый сигнал.
Механические
Отличаются наличием диска, материал которого представлен диэлектриком, с нанесённым на него выпуклым или непрозрачным участком. В механической системе абсолютный угол считывается с помощью линейки переключателей/контактов, а в оптической с помощью линейки оптронов. Выходной сигнал представлен кодом Грея, позволяющим убрать неоднозначность интерпретируемого сигнала.
Недостаток механического энкодера представляет собой дребезжание контактов, зачастую приводящий к неверному подсчёту и выявлению направления движения. Оптический и магнитный энкодеры не имеют этой особенности.
Параметры
Первоначальный параметр любого ДУПа представлен числом импульсов, получаемых за совершение одного оборота (разрешение/разрядность). Зачастую этот параметр равен 1024 за один оборот.
Из других критериев можно выделить:
- Напряжение – от пяти до 24В;
- Вид вала – пустой, сплошной;
- Размер вала/отверстия;
- Вид выхода – транзисторный и другие;
- Размер корпуса;
- Вид крепления.

Рисунок 4. Абсолютный оптический датчик
Установка
Энкодер устанавливают соответственно на валу, информацию которого необходимо получить. Для установки требуется специальная переходная муфта, с помощью которой можно скомпенсировать возможную разность в размерах с валом энкодера. Важно! Корпус ДУПа должен быть крепко зафиксирован.
Для монтажных работ преобразователя с полым валом необходим другой способ. В таком варианте вал, информацию которого нужно получить, включён внутрь ДУПа и закрепляется в пустой втулке. Стоит учитывать, что у такого типа ДУП корпус не закрепляется.
Подключение
В самом лёгком варианте, если имеется возможность, выход преобразователя подключается к входу счётчика и программируется на параметр скорости.
Однако обычно преобразователь используют вместе с контроллером. К нему присоединяют интересующие выходы. Далее программа определяет положение/скорость/ускорение объекта. К примеру, устройство установлено на электродвигательном валу, перемещающем один элемент в сторону другого. После вычислений на устройстве вывода виден зазор между элементами, при достижении которого движение элементов останавливается, для обеспечения их сохранности.
Энкодеры — датчики угла поворота

 Позиционирование в различных видах промышленного оборудования обеспечивается с использованием простых с виду устройств — энкодеров (или, по-другому, датчиков угла поворота).
Позиционирование в различных видах промышленного оборудования обеспечивается с использованием простых с виду устройств — энкодеров (или, по-другому, датчиков угла поворота).
Энкодеры используются для преобразования линейного или вращательного движения в двоичный цифровой сигнал. Энкодер представляет собой устройство, вал которого соединяется с вращающимся валом исследуемого объекта, и обеспечивает электронный контроль угла поворота последнего. По принципу действия энкодеры подразделяются на оптические и магнитные.
На валу оптического энкодера установлен диск с окнами прерывания по периметру, напротив которых размещены светодиод и фототранзистор, обеспечивающие формирование выходного сигнала в виде последовательности прямоугольных импульсов с частотой, пропорциональной как количеству окон прерывания, так и скорости вращения диска/вала. Количество импульсов отображает угол поворота.
Оптические энкодеры выпускаются в виде инкрементальных и абсолютных датчиков.
Инкрементальные энкодеры имеют диск прерывания с множеством окон одинакового размера на основном радиусе и две считывающих оптопары, что позволяет фиксировать как угол поворота, так и направление вращения вала. На вспомогательном радиусе диска размещено единственное окно прерывания и соответствующая оптопара, определяющие исходное положение (начало отсчета).
Отрицательный момент — инкрементальные энкодеры выдают относительный отсчет угла поворота, информация о котором не сохраняется при остановке вращения. К их преимуществам следует отнести простоту конструкции (и, соответственно, невысокую стоимость) при высоком разрешении и высокой рабочей частоте.
Инкрементальные энкодеры повышенной стойкости ориентированы на индустриальное применение — в машиностроении, прокатных станах, судостроении, текстильной, обувной промышленности, в деревообработке. Для таких энкодеров определяющими являются параметры — разрешение по углу поворота, способность работать на высоких частотах, высокая степень защиты, чтобы противостоять условиям неблагоприятной среды.
Диск с линиями или прорезями, которые прерывают луч света на оптический датчик. Электронная схема подсчитывает прерывания луча и генерирует цифровые выходные импульсы энкодера.
Кодирующий диск — устройство для преобразования в цифровую форму величин угловых перемещений вала. На кодирующий диск наносится геометрическое изображение цифрового кода. Знаки разрядов кода наносятся на концентрической дорожки, причем ближе к периферии располагаются младшие (менее значащие) разряды.
В зависимости от способа съема кода (контактного, фотоэлектрического, электромагнитного, индукционного, электростатического и т. п.) геометрическое изображение кода составляется из участков электропроводящих и электроизолированных, прозрачных и непрозрачных, магнитных и немагнитных и т. п.
Преимущественно распространение получили кодирующие диски с разновидностями двоичного кода, исключающими возникновение ошибок при переходе через границы отдельных дискретных участков, когда некоторые разряды могут считываться по одну сторону границы, а некоторые — по другую (из-за неточной установки съемных устройств или из-за неодновременном считывания кода в процессе вращения диска. К числу таких кодов относятся т. н. фау-код (код Баркера) и рефлексный код (код Грея).
В некоторых оптических поворотных энкодерах используется отражательный кодирующий диск. На этом диске чередуются секции, которые поглощают свет или отражают его, а источник света вместе с приемником располагаются с одной стороны диска. При наличии только одного источника и приемника света последовательность импульсов от датчика позволяет выяснить, на сколько шагов повернулся диск относительно своего предыдущего положения.
Одиночный датчик не может указывать направление вращения, но если добавить вторую пару «источник приемник», отстоящую по фазе на 90 о от первой, то микроконтроллер по разности фаз между последовательностями импульсов сможет определить направление вращения диска.
Следует помнить, что любая система, которая определяет относительное вращение диска, но не может измерить его абсолютное угловое положение, является инкрементным датчиком.
Абсолютный энкодер имеет диск прерывания с концентрическими окнами на разных радиусах, относительные размеры которых определяются двоичным кодом, и которые считываются одновременно, давая кодированный выходной сигнал для каждой угловой позиции (код Грея, бинарный код. ).
В данном случае имеется возможность получать данные о мгновенном положении вала без цифрового счетчика или возврата к исходному положению, так как на выходе имеется кодированное слово — «n bit», защищенное от электрических шумов.
Абсолютные энкодеры используются в приложениях, требующих обязательного сохранения поступающих данных в течение продолжительного времени, при этом они сложнее по конструкции и являются более дорогостоящими.
Абсолютные энкодеры с интерфейсом полевой шины имеют выходной интерфейс связи с полевой шиной по стандарту CANopen, ProfiBus, DeviceNet, Ethernet, InterBus и используют бинарный код при определении угла поворота. Вышеуказанные интерфейсы связи программируются по ряду параметров: например, направление вращения, разрешение по импульсам на один оборот, скорость передачи данных.

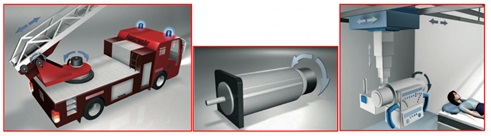
Энкодеры, установленные на валу электродвигателя , эффективно обеспечивают управление точным позиционированием. Такие энкодеры обычно изготавливаются в варианте «отверстие» и важными элементами их конструкции являются специальные муфты, позволяющие компенсировать люфты вала двигателя.
Позиционирование в вышеуказанных условиях наиболее эффективно обеспечивает магнитный энкодер , в котором преобразование углового перемещения вала в электронный сигнал реализуется бесконтактно на основе эффекта Холла, не связано с вращением оптического прерывателя внутри датчика, и допускает обработку сигналов на скоростях до 60000 об/мин.
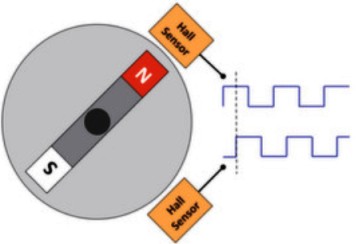
В магнитном энкодере высокоскоростное вращение внешнего вала, на котором закреплен цилиндрический постоянный магнит, воспринимается датчиком Холла, совмещенным на одном полупроводниковом кристалле с контроллером обработки сигналов.
При вращении полюсов постоянного магнита над микросхемой с датчиком Холла переменный вектор магнитной индукции наводит напряжение Холла, содержащее информацию о мгновенном значении угла поворота вала. Микроконтроллер обеспечивает быстрое преобразование напряжения Холла в параметр угла позиционирования

Возможность такого преобразования без непосредственного механического соединения элементов магнита и датчика Холла является основным преимуществом магнитных энкодеров, обеспечивает им высокую надежность и долговечность, и позволяет эффективно работать в высокоскоростных приложениях, связанных с промышленной автоматизацией, полиграфией, металлообработкой, инструментально-измерительным оборудованием.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Энкодеры (Encoders): особенности и применение

Энкодер (заимствованное зарубежное слово encoder), означает преобразователь. Сегодня это название объединяет целый класс изделий, получивших широкое распространение в автоматизации промышленных процессов. В качестве устройства контроля положения выделяют две основные группы по назначению: угловые (rotary, angular) и линейные (linear encoder). В отечественной технической и конструкторской литературе чаще встречаются следующие названия: датчик обратной связи (ДОС), преобразователь угловых / линейных перемещений, датчик угла поворота (ДУП), датчик положения, шифратор, кодировщик. Также популярны названия на английском: transducer, sensor. В немецкой документации: drehgeber (если угловой), line geber (если линейный).
Объединив все эти понятия, можно сказать, что энкодером называют устройство, которое преобразовывает механическое перемещение (линейное движение или вращение) посредством изменения физических величин (проходящий свет, магнитное или индуктивное поле) в последовательность сигналов. Формируемый на выходе электрический сигнал может быть аналоговым или цифровым. Он несет в систему управления верхнего уровня информацию о величине, направлении, скорости, перемещения, положении объекта.
Принцип работы энкодера
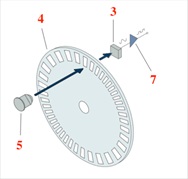
Как обеспечивается работа устройства лучше всего видно, если заглянуть «внутрь». Рассмотрим типовую и самую распространенную схему построения преобразователя – оптоэлектронную с подшипниковым узлом. На рисунке ниже представлен оптический многооборотный абсолютный датчик с цельным валом.
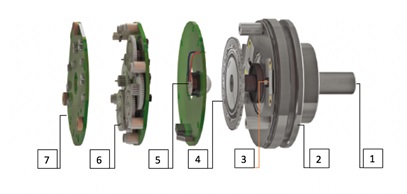
Здесь видны практически все основные узлы современного изделия:
- – вал энкодера
- – фланец (на данном рисунке представлен зажимной тип)
- – фотоприемник инфракрасного (ИК) света
- – оптический диск с растрами (метками, если инкрементный) или кодовыми дорожками (если абсолютный)
- – ИК осветитель (LED) с линзой на плате
- – механический редуктор с зубчатыми колесами (многооборотный модуль)
- – плата обработки сигнала с выходными формирователями и конверторами интерфейса.
Элементы 1, 2, 4 формируют оптико-механический подшипниковый узел. Оптический диск (лимб) 4 может быть стеклянным, металлическим, пластиковым. В зависимости от производителя бывают конструкции, где элементы 3 и 5 поменяны местами. Механический редуктор 6 встречается только у многооборотных абсолютных преобразователей.
На рисунке выше показана работа энкодера:
- ИК свет от источника 5 проходит через кодовый диск 4, и попадает на приемник (фото матрицу) 3
- Фотоприёмник имеет нанесенную на чувствительном элементе или расположенную над ним маску (индикаторную пластину), которая также имеет «окошки», как на вращающемся диске
- Из-за поочередного перекрытия и открытия окошек маски в процессе вращения вала датчика, проходящий свет имеет аналоговую структуру. Нет света -> нарастает -> максимум света -> убывает -> нет света
- Это регистрирует фото сенсор
- Далее аналоговый сигнал с приемника преобразуется платой обработки 7 в необходимые для дальнейшей передачи информации импульсы.
Виды энкодера
Основные типы, которые на слуху у всех специалистов, занимающихся автоматизацией:
- абсолютные (absolute) – всегда знают свое положение
- инкрементные (incremental) – относительные, считают только при включенном питании и вращении.
С развитием технологии, абсолютные энкодеры занимают все более прочные позиции на рынке. Если раньше соотношение было 70 на 30 и даже 80 на 20 % в пользу икнрементальных, то теперь их позиции равны. А в некоторых отраслях абсолютные преобладают.
Отдельно здесь можно выделить многооборотные энкодеры. Которые не только «запоминают» позицию внутри оборота, но и знают на каком обороте находятся. Количество оборотов зависит от используемого многооборотного модуля. У редукторного механического модуля количество регистрируемых оборотов как правило ограничено 12 (4096) или 14 битами (16384). У модуля со встроенной в энкодер батарейкой – до 18 (262144) и более бит. Многооборотный модуль, построенный на сенсорах Виганда, считает до 31 (2147483648) бит оборотов.

По конструкции выделяют угловые преобразователи следующих типов:
- С полым валом (hollow shaft):
- Сквозным (thru hollow)
- Глухим (тупиковым)(blind hollow).
- С цельным валом (solid shaft) с:
- Cинхро фланцем (synchro flange)
- Зажимным (clamping)
- Квадратным (square)
- Пилотным (pilot).
Самое полное портфолио энкодеров на рынке вы найдете на сайте f-enco.ru
Применение энкодера
Области применений сегодня настолько обширны, что преобразователь перемещений можно встретить в принтере, метро, самолете, трамвае, строительном кране, лифте, даже на продвинутом дачном участке в качестве датчика открывания ворот. Ниже представлен далеко не полный список применений, где датчики обратной связи получили наибольшее распространение:
- Автоматизация производств
- Упаковка
- Текстильное производство
- Производство продуктов питания и напитков
- Промышленные роботы

- Томографы
- Роботы-хирурги
- Передвижные буровые станции
- Карьерные самосвалы
- Передвижные краны
- Радиальные и барабанные ворота
- Вертикальные шлюзы
- Автоматические трубопроводные задвижки
- Пассажирские
- Грузовые
- Специализированные подъемники
- Автоматизированные склады
- Автопогрузчики
- Портовые краны
- Багажные ленты
- Ножничные подъемники
- Ветряные генераторы
- Солнечные батареи
- Универсальные станки
- Станки с ЧПУ
- Сервомоторы
Про Ардуино и не только
суббота, 9 сентября 2017 г.
Энкодер вращения
Сегодня я хочу рассказать об энкодерах вращения, какие они бывают, как работают и где применяются. И для примера рассмотрим подключение модуля KY-040 к Ардуино. А пока начнем с теории.

Что такое энкодер вращения
Энкодер вращения — это электромеханическое устройство, предназначенное для преобразования угла поворота вращающегося объекта в электрический сигнал (цифровой или аналоговый). Такие устройства находят широкое применение в промышленности, в роботостроении, автомобилестроении, компьютерной технике и т.п.
Энкодеры вращения можно разделить по принципу действия на оптические, магнитные, емкостные, индуктивные, резистивные и механические; по способу выдачи информации на абсолютные и инкрементные.
Принцип работы
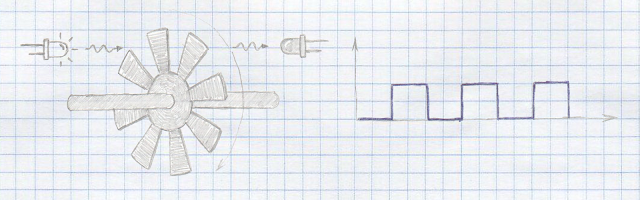
Работу энкодера вращения проще всего объяснить на примере оптического энкодера. Представьте себе вал электродвигателя, на котором закреплен диск с прорезями. С одной стороны диска расположен светоизлучающий элемент, луч света проходит через прорези и регистрируется фотоэлементом, расположенным с другой стороны (устройство, состоящее из спаренных светоизлучающего и принимающего элементов, называется фотопрерыватель). При вращении диска луч прерывается, в результате чего на выходе фотоэлемента мы получим меандр — сигнал прямоугольный формы. И частота меандра будет пропорциональна скорости вращения диска. Таким образом можно судить о скорости вращения вала электродвигателя.
Однако работающее по описанному принципу устройство не способно определить направление вращения. Чтобы исправить это добавим в него второй фотопрерыватель и расположим с некоторым смещением относительно первого. В зависимости от направления вращения диска сигнал на выходе первого фотопрерывателя будет меняться раньше или позже чем сигнал на выходе второго. А значит, анализируя как меняются эти два сигнала, мы можем определить направление вращения.
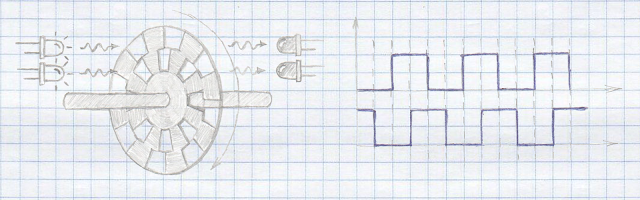
На практике смещения сигналов добиваются не за счет особого расположения фотопрерывателей, а путем добавления второй полосы с прорезями или прозрачными и непрозрачными участками. Участки на двух полосах расположены так чтобы обеспечить сдвиг сигнала по фазе на 90 градусов, поэтому работающие по такому принципу энкодеры называются квадратурными.
На этом же принципе основаны механические энкодеры, только вместо фотопрерывателей в них используются скользящие контакты. Основным недостатком таких энкодеров является дребезг контактов, который может приводить к неправильному подсчету сигналов. Кроме того скользящие контакты подвержены износу. Все это ограничивает область применения механических энкодеров.
Магнитные энкодеры строятся на базе магниточувствительных элементов, таких как датчики Холла или магниторезистивные датчики. Они просты в изготовлении, лишены недостатков контактных энкодеров и мало чувствительны к внешним факторам. Но все же проигрывают в точности емкостным, индуктивным и оптическим энкодерам.
Емкостные энкодеры имеют в своем составе диск асиметричной формы, который при вращении изменяет емкость между двумя электродами. Это изменение регистрируется и используется для определения углового положения. Емкостные энкодеры так же просты в изготовлении и надежны в эксплуатации, из внешних факторов чувствительны только к изменению влажности.
Индуктивные энкодеры работают в магнитном поле и используют явление электромагнитной индукции. Благодаря устойчивости к внешним факторам подходят для использования в неблагоприятной среде, когда другие энкодеры могут оказаться ненадежными.
Резистивный энкодер работает по тому же принципу что и обычный потенциометр: электрический сигнал на его выходе пропорционален положению ручки энкодера. Собственно и сами потенциометры могут использоваться для отслеживания углового положения, например, их можно увидеть в сервомашинках:

Абсолютные и инкрементные энкодеры
Приведенный выше пример оптического энкодера вращения генерирует на выходе импульсы, по которым принимающее устройство определяет текущее положение вала путём подсчёта числа импульсов счётчиком. Такие энкодеры называют инкрементными или накапливающими. Сразу же после включения инкрементного энкодера положение вала неизвестно. Для привязки системы отсчёта к началу отсчёта инкрементные энкодеры могут иметь нулевые (референтные) метки, через которые нужно пройти после включения оборудования. К недостаткам также относится то, что невозможно определить пропуск импульсов от энкодера по каким-либо причинам. Это приводит к накоплению ошибки определения угла поворота вала до тех пор, пока не будет пройдена нуль-метка.
Этих недостатков лишены абсолютные энкодеры. Они выдают на выходе сигналы, которые можно однозначно интерпретировать как угол поворота. Как и в приведенной выше схеме инкрементного энкодера, абсолютный оптический энкодер содержит светоизлучающий и принимающий элементы. Существенное отличие в используемом диске: он имеет прозрачные и непрозрачные участки на нескольких радиусах. Световые лучи, проходя через диск, засвечивают те или иные участки фоточувствительного элемента, который в свою очередь формирует на выходе соответствующие сигналы, уникальные для каждого положения диска.
Для кодирования углового положения абсолютные энкодеры используют диски с двоичными кодами и кодами Грея. Двоичный код удобен тем, что не требует дополнительных преобразований. В целом же использование кода Грея предпочтительнее т.к. он более устойчив к ошибкам чтения за счет того, что каждое следующее значение отличается от предыдущего только в одном разряде. При этом вероятность считывания совершенно неверного значения полностью исключена. Более подробно о коде Грея можно почитать в Википедии. На следующем изображении приведены примеры дисков для инкрементного квадратурного и абсолютного энкодеров.

Этот пример наглядно иллюстрирует принцип кодирования углового положения на диске абсолютного энкодера. Для каждого положения вала формируется свой уникальный код. В данном случае для кодирования 16 положений потребовалось 4 концентрических дорожки. При увеличении разрешения абсолютного энкодера возрастает число дорожек и разрядность считываемого значения. Поэтому наряду с параллельным интерфейсом в абсолютных энкодерах широко применяются последовательные интерфейсы, такие как Profibus, CANopen, SSI, BiSS, ISI, Profinet, PWM, Ethernet Powerlink, EtherNet TCP/IP, Modbus, DeviceNet, EtherCAT. Также существуют энкодеры, возвращающие значение углового положения в виде аналогового сигнала.
Абсолютные энкодеры могут быть однооборотными и многооборотными. Если однооборотные способны только выдавать значение угла поворота, то многооборотные позволяют также определять количество оборотов. Это возможно за счет наличия в их составе редуктора и дополнительного диска, который изменяет свое положение при каждом полном обороте вала энкодера.
Подключение инкрементного энкодера к Ардуино
Теперь после небольшой теоретической части можно перейти к практике. Попробуем подключить к Ардуино инкрементный энкодер вращения. У меня в распоряжении имеется модуль KY-040 (вроде того, что изображен на фото в начале этой статьи), который представляет из себя энкодер с разрешением 20 шагов на оборот со встроенной кнопкой, распаянный на плату с подтягивающими резисторами. Это идеальный компонент для организации меню: вращение вала энкодера можно интерпретировать как перемещение курсора по элементам меню, а нажатие кнопки — выбор конкретного элемента. Позже я приведу пример создания такого меню, а сейчас разберемся с подключением энкодера к Ардуино.

Подключим энкодер к Ардуино по следующей схеме:

Существует 2 способа работы с энкодером: с использованием прерываний и путем опроса выводов энкодера в теле программы. Первый способ требует четкий сигнал на выводах энкодера, без помех. Поскольку данный энкодер является механическим, сигнал на его выходах искажен дребезгом контактов и не может быть использован для генерации прерываний (по крайней мере без дополнительных средств для восстановления сигнала, о чем будет рассказано позже). Поэтому сейчас реализуем второй способ и бороться с дребезгом будем программно. Загрузим в Ардуино нижеприведенный код, ссылка для скачивания.
Для удобства работы код опроса энкодера помещен в отдельную функцию. В таком виде я использую ее в большинстве проектов с энкодером, достаточно скопировать функцию с переменными в новый скетч и в цикле опрашивать состояние энкодера. Подавление дребезга реализовано за счет добавления в функцию условия, которое обеспечивает опрос энкодера не чаще 1 раза в 5мс.
Подобный код можно увидеть на различных сайтах, и везде говорится что вывод CLK — это сигнал A, а вывод DT — это B. Почему-то на моих энкодерах это не так и сигналы поменяны местами. Этот момент учтен в функции при чтении значений с контактов. И если вдруг у Вас окажется, что при вращении вала энкодера по часовой стрелке значение переменной counter будет уменьшаться, то замените в функции строки чтения значений с выводов pin_CLK и pin_DT на следующие:
Итак, прошиваем код в Ардуино, запускаем монитор порта и вращаем ручку энкодера. Должно получиться что-то вроде этого: