Магнитный усилитель забытая схемотехника.
Магнитный усилитель совершенно забыт в 21 первом веке усилиями производителей радиодеталей. И напрасно.
Магнитный усилитель, это простота и красота схемотехники. С применением управляемых дросселей насыщения, можно упрощением схемы обойтись без целого огорода ламп и полупроводников.
Перед применением магнитных усилителей нужно отдельно разобраться с его работой в конкретном устройстве для конкретных режимов. Это узел, который плохо поддается расчетам.
Регулирующий дроссель это:
Количество витков силовой обмотки.
Количество витков обмотки управления.
Из этого следует, что для нормальной работы магнитного регулятора нужно всего лишь правильно подобрать количество витков в обмотках.
Сначала выбирается количество витков в силовой обмотке для данного железа. Силовая обмотка должна садить проходящее через нее напряжение требуемого тока, на величину предела регулировки, это без подачи управляющего напряжения на обмотку управления. Чем больший проходящий через обмотку ток, тем меньше КПД магнитного регулятора.
Теперь нужно подобрать число витков в управляющей обмотке для заданного тока, регулирующего напряжения.
Число витков в управляющей обмотке должно быть достаточным для полной компенсации падения напряжения на силовой обмотке, заданным током регулирующего напряжения. Магнитная индукция обмотки управления определяется числом витков на Вольт. Чем больше витков, тем меньший ток управления, но больше напряжение.
Пропорция витков в обмотках магнитного регулятора, или коэффициент трансформации, должен быть такой, чтобы силовая обмотка не влияла на обмотку управления больше, чем может компенсировать управляющее напряжение и ток схемы управления.
Это все быстро и легко подгоняется экспериментально.
Несколько закономерностей для магнитных ключей.
Чем больше токи протекают через силовую обмотку, тем меньше КПД магнитных ключей.
Магнитные ключи, это устройства, работающие без запасов, путем тщательного подбора под конкретный режим.
Чем шире диапазон регулирования, тем меньший КПД магнитного ключа.
Вот, для примера, несколько схем 1961 года, армейских и бытовых.
1. Стабилизатор анодного напряжения 5000 вольт лампы ГИ-19Б, применяемой в РЛС П-12, 1961г.
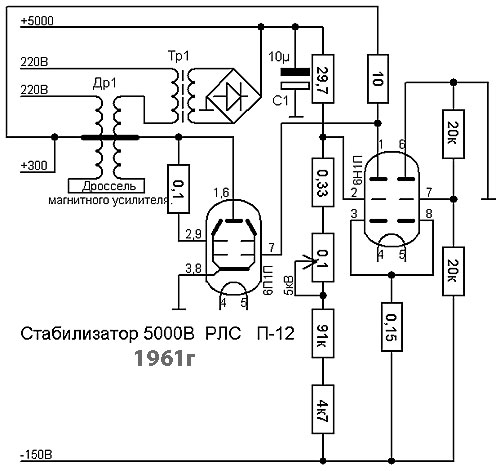
Схема была настолько засекречена, что описания принципа ее работы не было даже в сопутствующей документации.
Принцип ее работы основан на балансном мосте, выполненном на лампе 6Н1П. Чем больше положительное напряжение на 2й ножке — сетке регулирующей лампы 6Н1П, тем меньше напряжение на 7й ножке управляющей лапы 6П1П. Следовательно, меньше напряжение на управляющей обмотке магнитного ключа и меньше выходное напряжение.
2. Схема стабилизатора 7,5В, 35А для накала лампы ГИ-19Б, применяемой в РЛС П-12, 1961г.
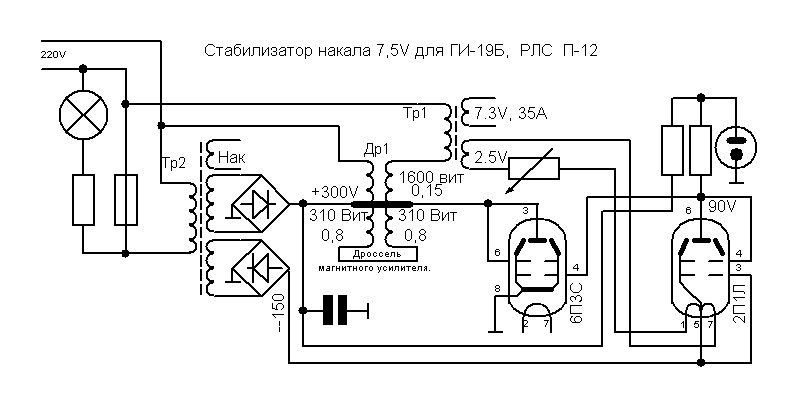
Особенность этой схемы, применение 2П1Л в качестве управляющей радиолампы.
2П1Л, это низковольтный лучевой тетрод прямого накала, предназначен для усиления звуковой частоты с напряжением накала 2В и конструктивно, с замком в ключе. Лампа для батарейных ламповых приемников. 2П1Л позже стала 2П1П — такая же, только пальчиковая.
Стабилизация напряжения в этом стабилизаторе осуществляется изменением накала лампы 2П1Л. В лампах прямого накала реакция на колебание накального напряжения намного быстрее, чем в лампах с косвенным накалом.
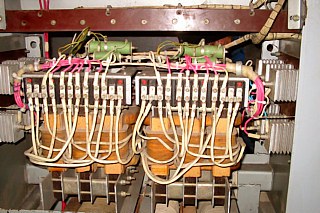
Вот фото магнитного ключа — стабилизатора накала лампы ГИ-19Б, в РЛС П-12.

Если в трансформаторе, через магнитный шунт, вместо обмотки управления сделать насыщенный резонансный контур 50Гц х 220В, то этот контур будет держать стабильное напряжение в некоторых пределах изменения входного напряжения и выходной нагрузки. Это уже будет феррорезонансный стабилизатор.
4. Схема стабилизатора напряжения СНФ-200 для телевизоров 1961г.
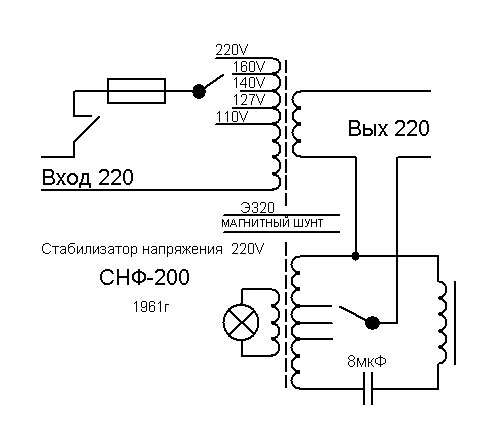
Работа схемы стабилизатора напряжения СНФ-200, заключается в следующем.
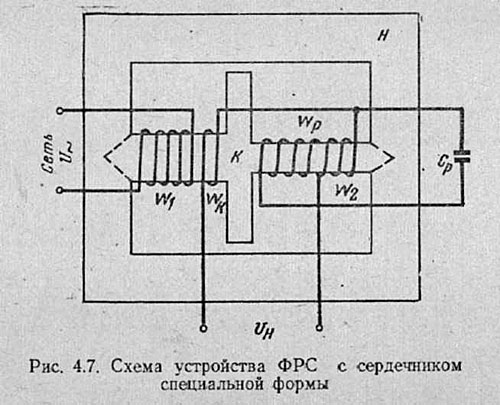
На толстой части керна мотается сетевая, ненасыщающаяся обмотка, которая подключается к сети 220В. Толщина керна не позволяет железу входить в насыщение в пределах допустимых нагрузок.
После магнитного шунта, толщина керна значительно меньше и в диапазоне нагрузок, на 10-15 процентов ниже максимальной мощности, железо входит в насыщение.
Напряжение на насыщенной обмотке при стабильной нагрузке, почти не меняется, при колебаниях сети 220В.
Расширить участок стабилизации до 20-30 процентов, можно компенсировав гистерезис железа, намотав некоторое количество витков на ненасыщенной части керна, в противоположную сторону. Таким образом, увеличение входного напряжения будет компенсировать неизбежный рост выходного напряжения, компенсируя гистерезис железа.

Количество витков компенсирующей обмотки зависит от ширины петли гистерезиса железа, пропорций количества витков в обмотках и диаметра провода.
Чем больше гистерезис железа, тем большие колебания выходного напряжения будут вызывать нестабильность нагрузки и нестабильность входного напряжения.
Уменьшение габаритов достигается применением резонансных конденсаторов в насыщающейся цепи, применением железа с малыми потерями и малой толщиной пластин.
Улучшение синусоиды на выходе, достигается применением резонансных дросселей в насыщающейся цепи.
Феррорезонансные стабилизаторы, кроме большого веса, габаритов, сильного гудения, имеют большую потребляемую мощность. Например, описываемый стабилизатор СНФ-200, являлся одним из лучших, и при этом его потребляемая мощность была 80Вт, при выходной мощности 160Вт.
Теперь можно привести примеры современных методов стабилизации переменного напряжения на основе магнитных регуляторов.
5. Вот простая схема эффективного стабилизатора напряжения на основе магнитного усилителя.
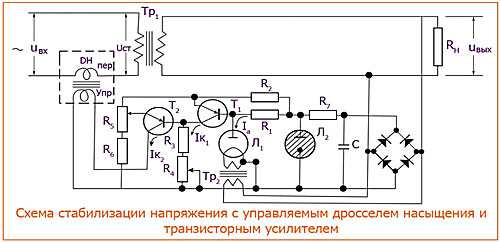
Выходное переменное напряжение стабилизируется магнитным усилителем, управляемым напряжением компенсации, получаемым от изменения накала дампового диода. Чем больше напряжение накала, тем больше компенсационное напряжение, и наоборот.
6. И напоследок схема регулировки сварочной дуги стационарной дуговой сварки ВДГ-303-3.
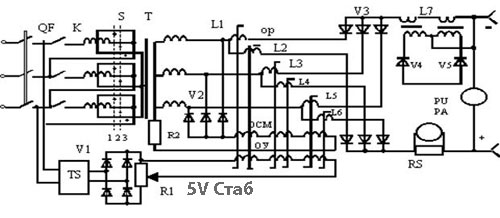
Напряжение дуги регулируется и стабилизируется управляющим, компенсирующим колебания сети 380В, напряжением 0+5В.
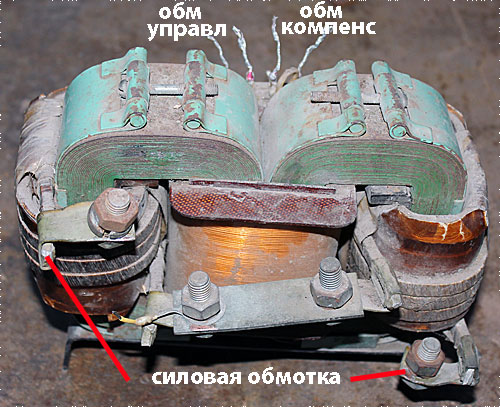
Вот фото магнитных ключей, стабилизаторов сварочного напряжения.
Спасибо за внимание.
С ув. Белецкий А. И. 15.01.2018г. Кубань Краснодар.
Магнитные усилители в металлообрабатывающих станках

Магнитные усилители нашли широкое применение в электроприводах металлорежущих станков из-за их надежности и большого срока службы (он считается одним из самых надежных элементов систем автоматики), отсутствия подвижных частей, возможности исполнения магнитных усилителей мощностью от долей ватта до сотен киловатт, большой прочности и стойкости по отношению к вибрациям и ударной нагрузке. Кроме этого у благодаря магнитным усилителям можно легко осуществить суммирование сигналов. Они имеют большой коэффициент усиления. В магнитных усилителях отсутствует электрическая связь между входными и выходными цепями.
Принцип действия магнитного усилителя основан на использовании нелинейности кривой намагничивания ферромагнитного материала. При намагничивании постоянным током сердечник усилителя насыщается и индуктивность рабочих обмоток переменного тока усилителя уменьшается. Рабочие обмотки обычно включаются последовательно с нагрузкой. Поэтому напряжение, которое до насыщения сердечника было приложено к рабочим обмоткам усилителя в момент насыщения, прикладывается к нагрузке.
Ток нагрузки регулируют изменением тока в обмотке подмагничивания магнитного усилителя. Обмотка смещения служит для создания начального подмагничивания, необходимого для того чтобы ток в нагрузке изменялся различным образом в зависимости от знака полярности сигнала управления, а также для выбора точки на прямолинейном участке характеристики. Обмотка обратной связи предназначена для получения требуемой формы выходных характеристик.
Конструктивно магнитный усилитель представляет собой сердечник из листового ферромагнитного материала, на который намотаны обмотки переменного и постоянного тока. Для устранения наводок э. д. с. переменного тока цепи обмоток постоянного тока обмотки переменного ока намотаны отдельно на сердечниках, а обмотки постоянного тока охватывают оба сердечника.
Схема простейшего магнитного усилителя
Магнитный усилитель может иметь несколько обмоток управления. В этом случае в рабочем режиме ток в нагрузке будет определяться суммарным током управления. То есть он может быть использован как сумматор электрических сигналов не связанных между собой (суммируются постоянные сигналы).
Магнитные усилители могут быть как нереверсивные, так и реверсивные. В нереверсивных магнитных усилителях изменение полярности сигнала управления не вызывает изменения фазы и знака тока нагрузки.
Сердечники магнитных усилителей изготовляют как из трансформаторной стали, так и из пермаллоя, причем трансформаторную сталь применяют при мощности магнитного усилителя, большей 1 Вт. Величина магнитной индукции в сердечнике из трансформаторной стали достигает 0,8 — 1,0 Т. Коэффициент усиления таких магнитных усилителей составляет от 10 до 1000.
Пермаллой применяют в магнитных усилителях, мощность которых меньше 1 В. Прямоугольный характер петли гистерезиса для пермаллоя позволяет получить коэффициент усиления от 1000 до 10 000 и выше.
Сердечник магнитного усилителя шихтуют из отдельных пластин, как сердечники дросселей или трансформаторов. Широкое распространение получили магнитные усилители на тороидальных сердечниках, которые, несмотря на технологические трудности их изготовления, обладают целым рядом преимуществ и первое из них — отсутствие воздушных зазоров, что улучшает характеристики магнитного усилителя.
Широко распространены следующие схемы магнитных усилителей: однотактные и двухтактные, реверсивные и нереверсивные, однофазные и многофазные.
В металлорежущих (и не только металлорежущих) станках можно встретить очень большое разнообразие конструкций магнитных усилителей: однофазные серии УМ-1П, трехфазные серии УМ-ЗП, собранные на шести П-образных сердечниках из стали марки Э310, однофазные серии ТУМ на тороидальном сердечнике, блоки магнитных усилителей серии БД, содержащие, кроме магнитных усилителей, понижающие трансформаторы, диоды и резисторы, собранные на одной панели. Системы электропривода могут быть построены на любых усилителях из этих серий.
Обмоточная схема магнитного усилителя УМ-1П
Кроме этого часто на различных станках применяются комплектные приводы с магнитными усилителями и двигателями постоянного тока, например очень распространенный привод с магнитными усилителями ПМУ. Но об этом мы обязательно поговорим следующий раз. Кроме этого, в следующем посте остановимся на методах наладки магнитных усилителей, затронем и ряд других вопросов, интересных всем кто постоянно сталкивается или собирается в будущем столкнуться в работе с магнитными усилителями.
Комплектные электроприводы с магнитными усилителями
Несмотря на то, что в современном электроприводе с успехом используются статические преобразователи (тиристоры, силовые транзисторы, IGBT-модули), на наших промышленных предприятиях все еще очень часто можно встретить электродвигатели и генераторы постоянного тока, работающие в комплекте с магнитными усилителями.
Магнитные усилители самое широкое распространение получили в промышленном оборудовании еще в 50-х годах. В целом, в эпоху дополупроводниковой техники существовала следующая тенденция – асинхронный и синхронный (для больших мощностей) привод применялся в нерегулируемом электроприводе и привод постоянного тока с электромашинным или статическим (тиритронный или ртутный выпрямители, магнитный усилитель) для регулируемого.
В настоящее время наиболее часто можно на отечественных предприятиях в схемах электрооборудования станков, машин и установок можно встретить комплектные электроприводы постоянного тока с магнитными усилителями серии ПМУ.
ПМУ — привод с магнитными усилителями и селеновыми выпрямителями. Диапазон регулирования скорости двигателя 10:1. Регулирование производится изменением напряжения на якоре вниз от номинальной частоты вращения двигателя. Система регулирования автоматическая с обратной связью по э. д с. двигателя, без тахогенератора и промежуточного усилителя. Мощность привода от 0,1 до 2 кВт. Привод предназначен для выпрямленное напряжение на выходе моста составляет от 340 до 380 В. Для получения достаточно жестких характеристик привода в схему введены отрицательные обратные связи по току и напряжению.
Каждый привод серии ПМУ представляет собой комплект, состоящий из блока питания, выпрямителей, магнитных усилителей, двигателя постоянного тока и задатчика скорости.
Привод работает следующим образом. Напряжение, подводимое к двигателю, автоматически следует за сигналом, зависящим от изменения его частоты вращения. При снижении частоты вращения двигателя напряжение возрастает и наоборот: напряжение поддерживает с заданной точностью величину частоты вращения независимо от изменения нагрузки и других возмущающих факторов.
Влияние различных возмущающих факторов на частоту вращения компенсирует реактивное сопротивление рабочей обмотки магнитного усилителя: при возрастании нагрузки ток в цепи якоря увеличивается, что вызывает уменьшение сопротивления рабочей обмотки магнитного усилителя. Вследствие снижения сопротивления рабочей обмотки напряжение на якоре двигателя возрастает, ток в обмотках увеличивается, что еще больше уменьшает полное сопротивление рабочих обмоток усилителя. В результате суммарного снижения сопротивления рабочей обмотки напряжение на якоре двигателя возрастает, что компенсирует снижение частоты вращения двигателя. Необходимая частота вращения двигателя устанавливается с помощью задатчика Р и резисторов R1 — R4.
ПМУ-М аналогична серии ПМУ, но магнитные усилители собраны на П-образных сердечниках. Мощность привода ПМУ-М от 0,1 до 7 кВт.
В приводах серии ПМУ-М применена система автоматического регулирования частоты вращения с обратными связями по напряжению и току якоря двигателя. Магнитный усилитель имеет две группы обмоток управления. По одной из них протекает ток управления, являющийся алгебраической суммой тока задатчика и токов обратных связей, другая (обмотка смещения) — служит для выбора рабочей точки на прямолинейном участке характеристики магнитного усилителя.
Для защиты от недопустимо больших значений тока якоря приводы ПМУ-М габаритов с 8 по 11 снабжены узлом ограничения тока. При превышении током якоря допустимых значений срабатывает реле максимального тока, его размыкающий контакт размыкается и обрывает цепь питания обмотки управления. Так как обмотка смещения остается замкнутой, то магнитный усилитель запирается и ток якоря снижается. Действие схемы привода ПМУ-М аналогично действию схемы привода ПМУ.
ПМУ-П — приводы повышенной точности и расширенного диапазона регулирования 100 : 1. Система регулирования автоматическая с обратной связью по частоте вращения, которая осуществляется с помощью тахогенератора и промежуточного полупроводникового усилителя. Частота вращения двигателя регулируется изменением напряжения на якоре.
Кстати, магнитные усилители могут быть также использованы для регулирования напряжения на зажимах асинхронного двигателя, а также в качестве бесконтактных пускателей.
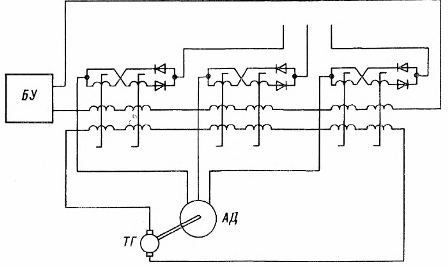
Система магнитный усилитель-асинхронный двигатель

МАГНИТНЫЙ УСИЛИТЕЛЬ
Магнитные усилители широко применяются на отечественных тепловозах в системах регулирования мощности дизель-генераторов и в других устройствах автоматики.
Работа магнитных усилителей основана на использовании законов прохождения переменного тока в электрических цепях и физических свойств ферромагнитных материалов. Магнитный усилитель имеет сердечник, на который надеты катушки обмоток (рис. 222).
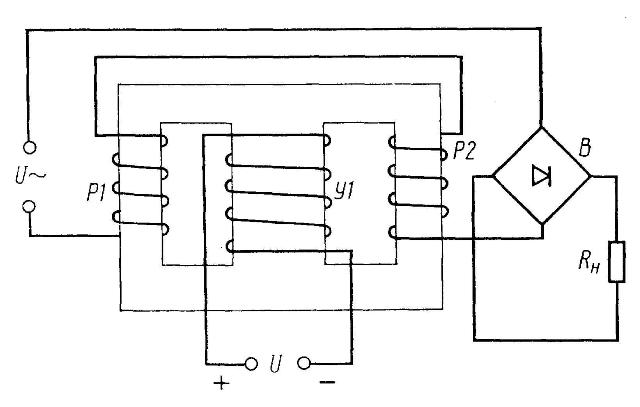
Рис. 222 Схема магнитного усилителя
Сердечник изготавливают из электротехнической стали или других ферромагнитных материалов, например из пермаллоя. Катушки Р1 и Р2 рабочей обмотки усилителя включены в цепь переменного тока. В обмотку управления У1 подводится постоянный ток. Рабочая обмотка магнитного усилителя представляет собой индуктивное сопротивление.
При описании возбудителей с расщепленными полюсами подробно рассматривался процесс намагничивания ферромагнитных сердечников. Если вначале с увеличением магнитодвижущей силы пропорционально ей возрастают магнитный поток и магнитная индукция, то при наступлении магнитного насыщения материала сердечника практически прекращается изменение магнитной индукции, как бы ни увеличивали мы магнитодвижущую силу за счет повышения величины тока в обмотке. Явление магнитного насыщения ферромагнитных материалов использовано в магнитном усилителе.
Вследствие большого индуктивного сопротивления рабочей обмотки при отсутствии тока в обмотке управления сила тока в цепи рабочей обмотки будет весьма невелика. Если по обмотке управления пропустить постоянный ток и довести сердечник до магнитного насыщения, то переменный ток рабочих обмоток уже не будет создавать дополнительного изменяющегося магнитного потока. Индуктивное сопротивление рабочих обмоток резко снизится, и в соответствии с законом Ома ток, протекающий по этим обмоткам, значительно увеличится. При постепенном увеличении тока в обмотке управления также постепенно снижается переменный магнитный поток, создаваемый рабочими обмотками, и нарастает ток в цепи этих обмоток.
В магнитных усилителях устанавливаются две катушки Р1 и Р2 рабочей обмотки (см. рис. 222). Ими создаются согласные по направлению магнитные потоки, замыкающиеся во внешнем кольце магнитопровода усилителя. В среднем стержне с обмоткой управления магнитные потоки рабочих обмоток имеют противоположное направление, взаимокомпенсируются и не индуктируют э. д. с. в обмотке управления. Появление трансформаторной э. д. с. в управляющей обмотке могло бы привести к нарушению работы цепей управления.
Обмотка управления потребляет небольшую мощность. Благодаря этому с помощью небольшого тока, затрачивая незначительную мощность, можно регулировать в широких пределах достаточно большую по величине мощность нагрузки. Отсюда такие аппараты получили свое наименование усилителей.
Магнитный усилитель можно рассматривать и как регулируемый резистор в цепи переменного тока, изменение сопротивления которого производится с помощью управляющего постоянного тока.
Нагрузка Rн т. е. объект, в котором ток регулируется с помощью магнитного усилителя, включается в цепь рабочих обмоток. Нагрузкой магнитных усилителей часто являются обмотки возбуждения генераторов. Чтобы через нагрузку проходил постоянный, а не переменный ток, в цепь включается выпрямительный мост В.
Отношение тока нагрузки к току в обмотке управления называют коэффициентом усиления магнитного усилителя по току, а отношение мощностей нагрузки и управления — коэффициентом усиления по мощности. Коэффициенты усиления обычных магнитных усилителей обычно лежат в пределах от 50 до 200.
Увеличения коэффициентов усиления магнитных усилителей достигают применением обратной связи. Схемы таких усилителей показаны на рис. 223.
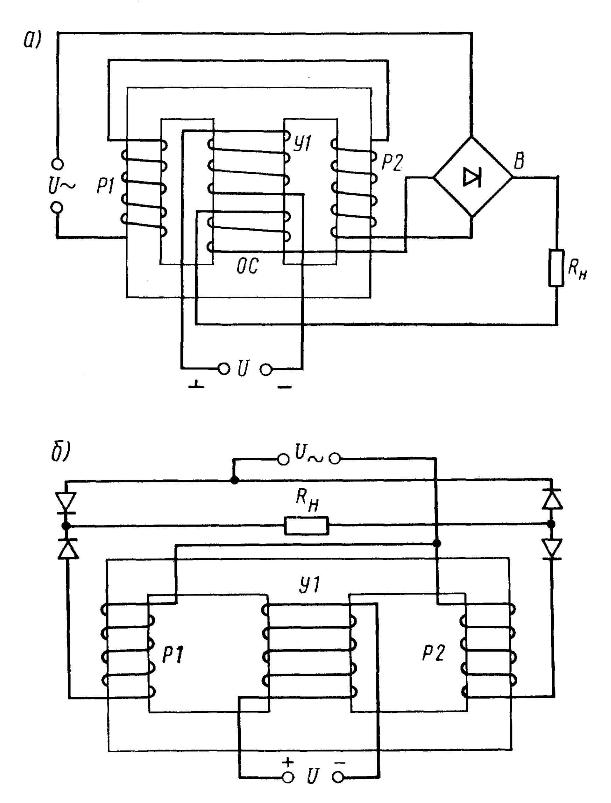
Рис. 223. Схемы магнитных усилителей с обратными связями: а) внешней; б)внутренней
Усилитель оборудуется дополнительной обмоткой обратной связи ОС (рис. 223, а), которая устанавливается вместе с обмоткой управления и включается последовательно с внешней нагрузкой Rн. Через обмотку обратной связи проходит уже выпрямленный выходной ток рабочих обмоток. Создаваемый ею магнитный поток усиливает магнитный поток обмотки управления У1. В процессе работы магнитного усилителя при увеличении тока в обмотке управления увеличивается ток рабочих обмоток и одновременно возрастает ток в обмотке обратной связи, так как она включена последовательно с нагрузкой. Поэтому обмотка обратной связи усиливает действие обмотки управления. При небольшом увеличении тока управления происходит резкое изменение тока нагрузки. В рассмотренном усилителе была применена специальная обмотка обратной связи. Такие магнитные усилители называют усилителями с внешней обратной связью. В качестве обмоток обратной связи могут быть использованы и рабочие обмотки (рис. 223, б). В этом случае они как бы берут на себя дополнительную роль, а специальной обмотки обратной связи не имеется. Последовательно с каждой рабочей обмотки включается выпрямитель. Поэтому через катушки рабочих обмоток ток проходит только в одном направлении. Каждая катушка работает лишь в течение полупериода изменения величины переменного тока. В результате рабочие катушки создают магнитный поток одного направления, совпадающего с направлением магнитного потока управляющей (регулировочной) обмотки. Таким образом, рабочие обмотки усиливают действие регулировочной обмотки, увеличивая коэффициент усиления. Такая система обратной связи получила название внутренней. Внутренняя обратная связь упрощает устройство магнитного усилителя, так как не требует установки дополнительной обмотки.
Рассмотренные выше обратные связи являются положительными, приводящими к увеличению коэффициента усиления магнитного усилителя. Могут применяться при необходимости и отрицательные обратные связи, снижающие коэффициент усиления.
Магнитные усилители, используемые в электрических схемах тепловозов для регулирования мощности тяговых генераторов, имеют внутреннюю положительную обратную связь. Они получили название амплистатов.
Само слово амплистат состоит из двух частей: ампли — происходит от латинского слова amplificatio — усиление (увеличение) и стат -— от греческого слова statos — стоящий (неподвижный). Таким образом, в переводе амплистат.— это статический (неподвижный, без вращающихся частей) усилитель. Коэффициент усиления по мощности магнитных усилителей с обратной связью очень велик. У тепловозных амплистатов он составляет около 50 000.
При наличии обратной связи даже в случае отсутствия тока в обмотке управления магнитный усилитель подмагничивается рабочими обмотками, и ток нагрузки достигает значительной величины. Если теперь пропускать ток по обмотке управления в том направлении, при котором создаваемый ею магнитный поток будет усиливать намагничивающее действие рабочих обмоток, то выходной ток усилителя возрастет.
Изменение направления тока в обмотке управления вызовет размагничивание усилителя и снижение выходного тока вплоть до определенной наименьшей величины- Отношение наибольшего выходного тока магнитного усилителя к наименьшему называют кратностью выходного тока усилителя. Большая кратность выходного тока — очень важное достоинство магнитных усилителей.
В магнитных усилителях часто применяется несколько обмоток управления. При этом ток нагрузки усилителя могут независимо регулировать ряд различных автоматических устройств. Величина тока нагрузки будет определяться алгебраической суммой магнитодвижущих сил обмоток управления.
Показанные на рис. 222 и 223 магнитные усилители работают на однофазном переменном токе. Кроме того, применяются трехфазные магнитные усилители, состоящие как бы из трех однофазных усилителей. Трехфазные магнитные усилители были использованы в электросхемах тепловозов ТЭ10 для регулирования тока в обмотке независимого возбуждения тягового генератора.
На тепловозах 2ТЭ10Л, 2ТЭ10В и ТЭП60 однофазные амплистаты применены в качестве основного аппарата управления мощностью тягового генератора.
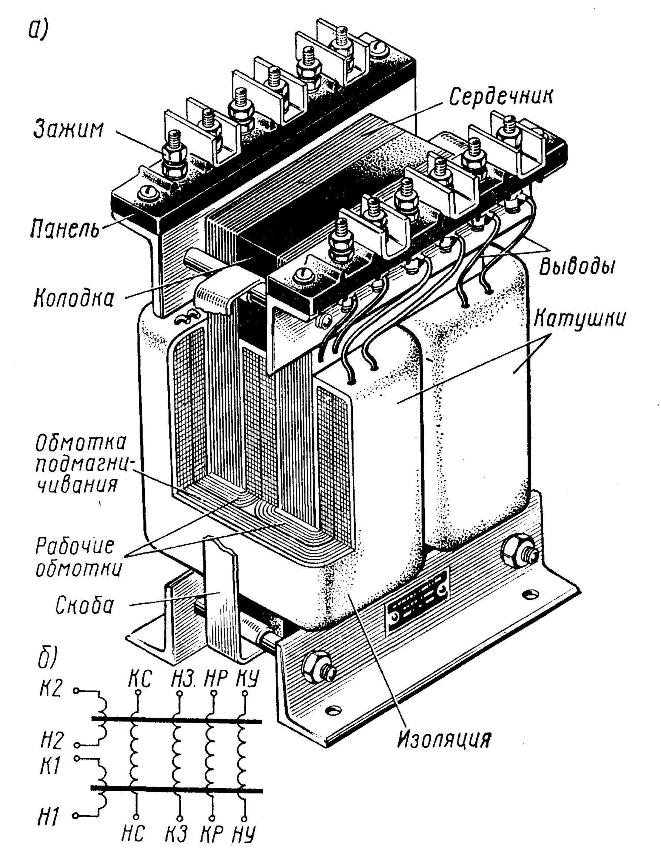
Рис. 224. Амплистат возбуждения тепловоза 2ТЭ10Л а) общий вид; б) электрическая схема
Амплистат выполнен с двумя магнитными сердечниками (магнитопро-водами), набранными из листов электротехнической стали толщиной 0,35 мм (рис. 224). На каждом сердечнике расположено по одной катушке Н1-К1 и Н2-К2 рабочей обмотки. Четыре обмотки подмагничивания (управления) — задающая, управляющая, регулировочная и стабилизирующая—охватывают оба сердечника. Рабочая обмотка амплнста-та включена последовательно с выпрямителем в цепь питания обмотки независимого возбуждения от подвоз-будителя переменного тока. Обмотки подмагничивания питаются постоянным током от источников:
- задающая обмотка НЗ — КЗ — от бесконтактного тахометрического блока или тахогенератвра на тепловозах первых лет постройки;
- управляющая обмотка НУ — КУ—от распределительного трансформатора через трансформаторы постоянного тока и напряжения и селективный узел электрической схемы;
- регулировочная обмотка HP — КР — от распределительного трансформатора через индуктивный датчик объединенного регулятора и выпрямитель;
- стабилизирующая обмотка НС — КС — от стабилизирующего трансформатора через выпрямитель.
При этом задающая обмотка создает основную положительную магнитодвижущую силу подмагничивания- Регулировочная обмотка усиливает подмагничивание амплистата. Магнитодвижущая сила управляющей обмотки направлена встречно магнитодвижущей силе задающей и регулировочной обмоток, поэтому управляющая обмотка размагничивает амплистат. Стабилизирующая обмотка получает питание только при переходных процессах возбудителя для сглаживания этих процессов и повышения устойчивости работы схемы.
Следовательно, рабочие обмотки амплистата являются регулируемым индуктивным сопротивлением в цепи возбуждения возбудителя. Величина сопротивления изменяется в результате совместного действия четырех обмоток управления. Чем больше ток в задающей и регулировочной обмотках (ток уставки), тем значительнее выходной ток амплистата и выше» напряжение возбудителя и тягового генератора. С увеличением тока в управляющей обмотке вследствие ее размагничивающего действия уменьшается выходной ток амплистата, соответственно снижается напряжение возбудителя и тягового генератора.
При работе дизеля с заданной частотой вращения коленчатого вала напряжение тахометрического блока сохраняется постоянным, поэтому остается постоянной и магнитодвижущая сила задающей обмотки. С увеличением частоты вращения вала дизеля по позициям контроллера пропорционально повышаются выходное напряжение тахометрического блока, ток в задающей обмотке амплистата, ток возбуждения возбудителя, его напряжение и напряжение тягового генератора. Схема питания управляющей обмотки обеспечивает регулирование тока в ней в зависимости от силы тока и напряжения тягового генератора с целью получения его селективной характеристики.
Ток в регулировочной обмотке амплистата изменяется с помощью индуктивного датчика объединенного регулятора частоты вращения и мощности дизеля таким образом, чтобы мощность тягового генератора сохранялась постоянной на гиперболическом участке его внешней характеристики. Следовательно, магнитный поток регулировочной обмотки корректирует суммарное подмагничивание сердечника амплистата, преобразуя линейный участок селективной характеристики тягового генератора и гиперболический.
Рабочая обмотка амплистата выполнена из 236 витков медного провода диаметром 1,35 мм. Номинальная величина напряжения питания цепи рабочей обмотки равна 60 В, ток продолжительного режима достигает 8,5 А. Обмотки управления рассчитаны на номинальный ток до 1,4 -— 1,5 А, изготовлены из более тонкого медного провода диаметром 0,8 мм. Число витков задающей- и управляющей обмоток равняется 500, а корректирующей регулировочной — 200. В рабочей части характеристики (рис. 225) внешний ток амплистата изменяется от 0,2 до 9 А, т.е. кратность выходного тока равна 45 и является вполне достаточной для регулирования возбуждения тягового генератора в необходимых пределах.
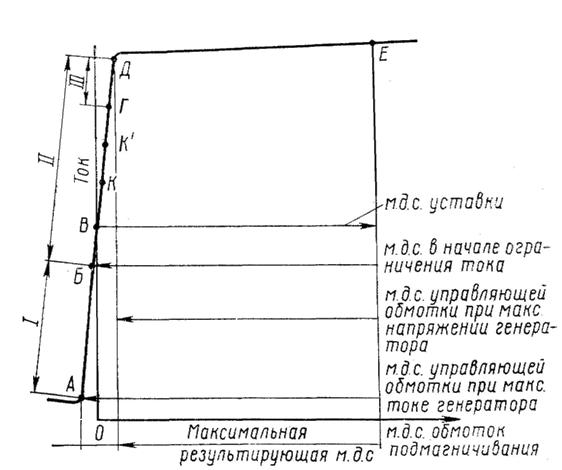
Рис. 225. Характеристика аплистата возбуждения
Магнитный усилитель мощности
В систему автоматического управления (САУ) электрической передачей современных тепловозов входят магнитные усилители. Магнитным усилителем (МУ) называется электромагнитный управляющий аппарат, обеспечивающий плавное изменение величины переменного тока в результате изменения индуктивного сопротивления катушки с ферромагнитным сердечником при подмаг-ничивании его постоянным током управляющих обмоток.
Простейший МУ имеет два сердечника (рис. 14), на которых смонтированы рабочие обмотки ОР1, ОР2 с равным числом витков дор, соединенные встречно друг другу. Они включены в цепь переменного тока с неизменным напряжением и. Обмотка управления ОУ с числом витков шу охватывает оба сердечника и получает питание от источника постоянного тока (тока управления).
Рассмотрим несколько упрощенно принцип действия МУ, полагая неизменной индуктивность его обмоток в течение периода напряжения питания (используя теорию линеаризованного магнитного усилителя). Переменный ток в рабочей обмотке зависит от общего сопротивления цепи 1, которое включает активное сопротивление цепи /?„ и индуктивное сопротивление обмотки Хи. Ток по закону Ома для цепи пеоеменного тока

Появление индуктивного сопротивления в обмотке обусловливается электродвижущей силой (э. д. с.) самоиндукции Эта э. д. с. индуцируется в витках обмотки под действием изменяющегося магнитного потока, вызванного переменным током. Направлена э. д. с. самоиндукции всегда так, чтобы препятствовать изменению тока. Она тем больше, чем больше скорость изменения тока в витках или пронизывающего их магнитного потока. Эта скорость зависит от частоты переменного тока /.
Обмотки в зависимости от числа витков, геометрических размеров, материала сердечника обладают различными свойствами с точки зрения индуцирования э. д. с. самоиндукции. Эти свойства характеризуются индуктивностью Ь. Индуктивное сопротивление (Ом) подсчитывается по формуле

где Ца — абсолютная магнитная проницаемость, Гн/м, 5С — площадь поперечного сечения сердечника, м2, /с — средняя длина магнитных силовых линий в сердечнике, создаваемых током рабочей обмотки или обмотки управления, м
Абсолютная магнитная проницаемость ца характеризует магнитные свойства среды, т. е. различную способность создавать магнитный поток. Магнитная проницаемость вакуума цо. называемая магнитной

Рис 14 Схема простейшего магнитного усилителя
ОУ — обмотка управления, ОР1, ОР2 — рабочие обмотки, Ян — резистор в цепн рабочих обмоток, II ^ — напряжение пнтання рабочих обмоток, I, — ток в цепи рабочих обмоток

Рис 16 Характеристика управления про стейшего магнитного усилителя (без обратной связи)
постоянной, является важной физической константой и в СИ равна 0,000001257 Гн/м.
Магнитная проницаемость материала Ц — безразмерная величина, показывающая, во сколько раз абсолютная магнитная проницаемость
данного материала ца больше магнитной постоянной цо, т. е. ц.= = Ца/Н’0- Магнитная проницаемость ферромагнитных материалов (железо, никель, кобальт и их сплавы) в тысячи раз больше, чем для вакуума. Магнитная проницаемость воздуха, а также неферромагнитных материалов близка к единице (ц = = 1)
При увеличении тока в обмотках управления МУ увеличивается напряженность магнитного поля (А/м),

где /у — ток в обмотке управления, А
С увеличением напряженности магнитного поля Н возрастает магнитная индукция В до момента магнитного насыщения сердечника, после которого индукция В остается постоянной (рис. 15). При намагничивании сердечника магнитная проницаемость ц = В/(10Н). После магнитного насыщения сердечника при его дальнейшем намагничивании 1 резко уменьшается и стремится к значению, близкому к единице. Магнитная проницаемость ц может служить показателем степени намагниченности сердечника. При большом намагничивании ферромагнитный сердечник по способности пропускать магнитный поток приближается к неферромагнитным материалам, и МУ в этом случае фактически неуправляем (это есть режим максимальной отдачи).
Таким образом, при увеличении тока управления (тока входа) /у увеличивается напряженность магнитного поля Я, уменьшается магнитная проницаемость ц и абсолютная магнитная проницаемость ца. Это приводит к уменьшению индуктивности Ь и индуктивного сопротивления Х[, а следовательно, к увеличению рабочего тока (тока выхода) /р. Индуктивность Ь, как известно, не зависит от направления тока управления /у, поэтому характеристика управления МУ (рис. 16) симметрична относительно оси /р
Когда ток управления равен нулю, сердечник МУ не намагничен н его рабочие обмоткн имеют большое индуктивное сопротивление. Поэтому рабочий ток будет мал; его называют током холостого хода МУ (/хх). Прн увеличении тока управления происходит подмагничи-вание сердечника, и рабочий ток МУ увеличивается. Средняя часть характеристики, близкая к прямолинейной, является рабочей. Даже небольшое изменение тока управления вызывает резкое изменение рабочего тока.
МУ имеет две рабочие обмотки для того, чтобы исключить индуцирование переменной э. д. с. в обмотках управления от рабочего тока. При встречном включении рабочих обмоток с равным числом витков индуцируемые в обмотках управления э. д. с. от каждой из рабочих обмоток будут компенсировать друг друга. Естественно, что каждая из рабочих обмоток должна быть смонтирована на отдельном сердечнике, так как при встречном включении рабочих обмоток с равным числом витков на общем сердечнике результирующая индуктивность МУ равнялась бы нулю.
Магнитный усилитель может иметь несколько обмоток управления, и тогда подмагничивание сердечника будет определяться результирующей магнитодвижущей силой (м. д. с.) этих обмоток 2/»у.
Изменение частоты переменного тока / меняет индуктивное сопротивление рабочих обмоток [см. формулу (2) ]. Поэтому применение в МУ переменного тока повышенной частоты позволяет при том же индуктивном сопротивлении XI иметь меньшую индуктивность Ь, т. е. меньшее число витков рабочей обмотки и площадь поперечного сечения сердечников. С другой стороны, для МУ повышение частоты питающего тока увеличивает крутизну наклона характеристики управления, так как в общем сопротивлении 1 = =д/ #н + (2л/1)2 увеличивается ин-
дуктивная составляющая. Повышение частоты переменного тока увеличивает быстродействие МУ.
Параметры МУ подбирают таким образом, чтобы его характеристики мало зависели от изменения в достаточно широких пределах питающего напряжения и сопротивлений нагрузочных резисторов. Так, у тепловозных МУ индуктивное сопротивление обмоток делают намного больше активного, поэтому характеристики тепловозных МУ мало зависят от позиции контроллера (от частоты вращения коленчатых валов дизеля). В этом можно убедиться, проанализировав формулы (1) — (3). Если Хь намного больше /?н, то последним можно пренебречь и тогда формула (1) примет вид

Напряжение II и частота / пропорциональны частоте вращения ротора синхронного подвозбудителя, приводимого от вала дизеля. Поэтому ток / от частоты вращения ротора синхронного подвозбудителя не зависит, а полностью определяется индуктивностью обмоток: / = / /Ь.
Основными параметрами МУ являются его коэффициенты усиления: тока и мощности. Коэффициент усиления тока Кг представляет отношение изменения рабочего тока А/р к соответствующему изменению тока управления А/у. При работе простейшего МУ на прямолинейной части характеристики управления можно, пренебрегая весьма малым током холостого хода /хх, коэффициент усиления тока рассматривать как отношение токов:

Коэффициент усиления мощности Кр представляет собой отношение выходной мощности в цепи рабочего тока Р„ых к мощности, потребляемой обмотками управления Рвх, т. е. КР =
= Рвых/Рвх- Коэффициенты уСИЛвНИЯ
простейших МУ находятся в преде-
лах от нескольких десятков до нескольких сотен единиц. Чем больше коэффициенты усиления, тем круче характеристика МУ.
Важным параметром МУ с точки зрения использования его в системах автоматического управления является кратность изменения рабочего тока:
Сердечники МУ выполняют из холоднокатаной электротехнической стали или из тонкой ленты пермаллоя (железоникелевый сплав с примесью молибдена, хрома, меди, и марганца). Эти материалы имеют узкую петлю гистерезиса и кривую намагничивания, близкую к прямоугольной, т. е. с резко выраженным насыщением. Желательно, чтобы насыщение наступало при возможно меньшей напряженности магнитного поля, так как это позволит достичь максимального тока в рабочей цепи при малом токе управления. При малой напряженности магнитного поля (слабых магнитных полях) магнитная проницаемость ц. должна быть возможно большей, ибо прн этом будет меньшим ток холостого хода.
При высоком качестве материала сердечника и диодов рабочая часть характеристики управления МУ с самоподмагничиванием (см. п. 2.2) имеет большую крутизну (больший коэффициент усиления) и близка к прямолинейной. При большой индуктивности нагрузки форма характеристики МУ может несколько искажаться.
БЛОГ ЭЛЕКТРОМЕХАНИКА
Студенческий блог для электромеханика. Обучение и практика, новости науки и техники. В помощь студентам и специалистам
- главная
- инфо
- блог
- словарь электромеханика
- электроника
- крюинговые компании
- Одесса/Odessa
- Николаев/Nikolaev
- Обучение
- Предметы по специальности
- АГЭУ
- АСЭЭС
- Диагностика и обслуживание судовых технических средств
- Мехатронные системы
- Микропроцессоры
- Моделирование электромеханических систем
- МПСУ
- САЭП
- САЭЭС
- СДВС
- СИВС
- Силовая электроника
- Судовые компьютерные ceти
- СУЭ и ОСУ
- ТАУ
- Технология судоремонта
- ТЭП
- ТЭЭО и АС
- Общие предметы
- Безопасность жизнедеятельности
- Высшая математика
- Ділова українська мова
- Интеллектуальная собственность
- Культурология
- Материаловедение
- Охрана труда
- Политология
- Системы технологий
- Судовые вспомогательные механизмы
- Судовые холодильные установки
- I курс
- конспекты
- ргр
- контрольные
- лабораторные
- курсовые
- зачёты
- экзамены
- II курс
- конспекты
- ргр
- контрольные
- лабораторные
- курсовые
- зачёты
- экзамены
- III курс
- конспекты
- ргр
- контрольные
- лабораторные
- курсовые
- зачёты
- экзамены
- IV курс
- конспекты
- ргр
- контрольные
- лабораторные
- курсовые
- зачёты
- экзамены
- V курс
- конспекты
- ргр
- контрольные
- лабораторные
- курсовые
- зачёты
- экзамены
- Предметы по специальности
- Теория
- английский
- интернет-ресурсы
- литература
- тематические статьи
- Практика
- типы судов
- пиратство
- видеоуроки
- мануалы
- морской словарь
- технический словарь
- история
- новости науки и техники
- авиация
- автомобили
- военная техника
- робототехника
26.03.2015
Что такое магнитный усилитель?
Магнитный усилитель (МУ) представляет собой статический электромагнитный аппарат, позволяющий при помощи управляющего сигнала постоянного тока небольшой мощности управлять значительными мощностями в цепи переменного тока. Благодаря простоте конструкции, высокой надежности в работе и другим достоинствам, по сравнению с электронными и электромашинными усилителями, магнитные усилители нашли довольно широкое применение в различных судовых системах автоматического регулирования.
По конструкции МУ напоминает трансформатор, у которого одна обмотка (управляющая ОУ) получает питание от источника постоянного тока, а другая (рабочая ОР) включена последовательно с нагрузкой Rн в цепь переменного тока.
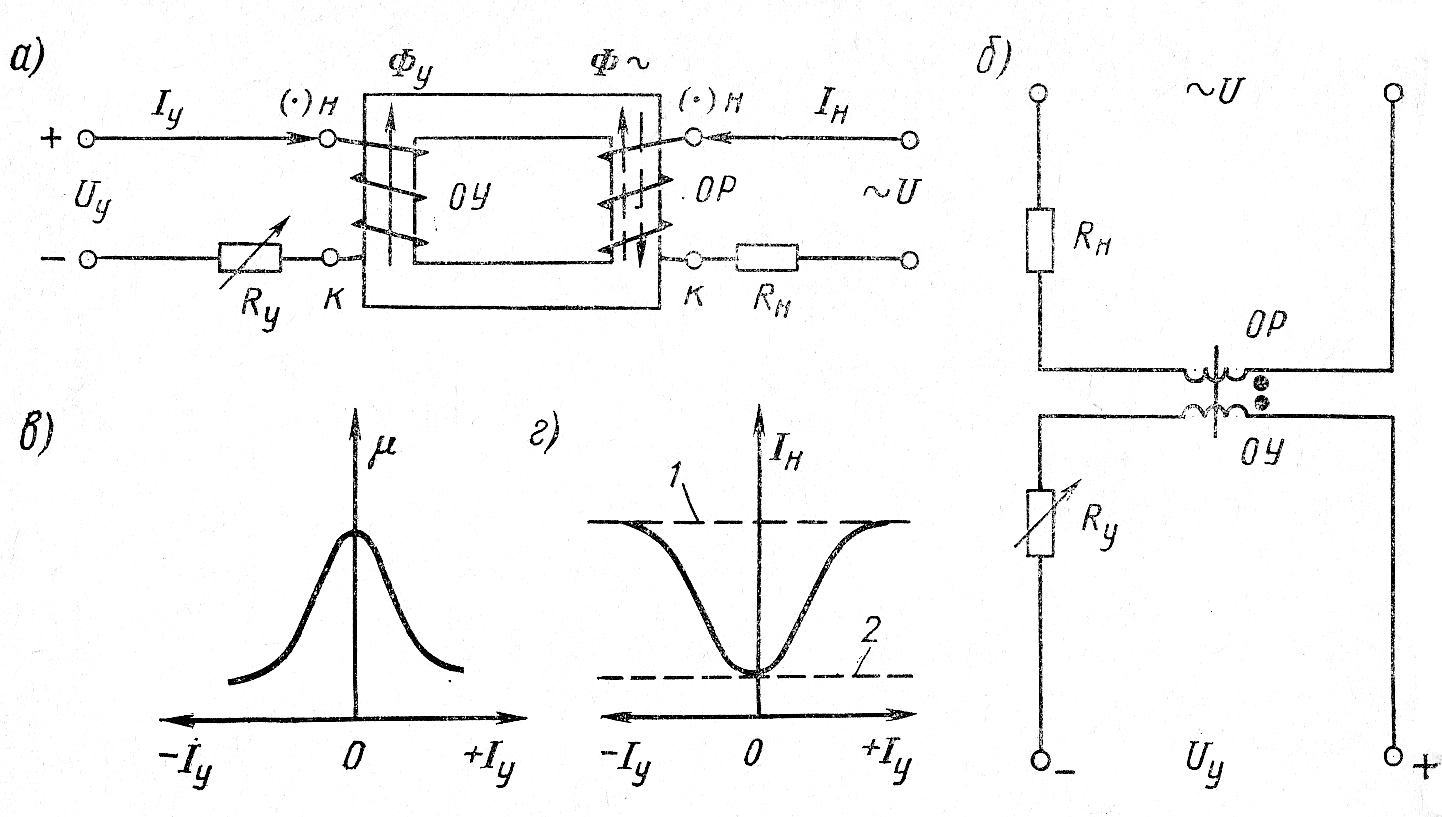
Простейшим МУ является дроссель насыщения (рис. 1,а,б), работа которого заключается в следующем.
где Rp, Хp — активное и индуктивное сопротивления обмотки ОР.
Если теперь включить обмотку ОУ на напряжение Uу источника постоянного тока и с помощью резистора увеличивать ток управления Iу, то одновременно будет увеличиваться и ток в рабочей обмотке Iн. Увеличение тока в обмотке ОР объясняется тем, что при прохождении по обмотке ОУ постоянного тока Iу возникает магнитный поток Фу, изменяющий насыщение сердечника дросселя.
На рис. 1, б показана электрическая схема магнитного усилителя. От степени насыщения сердечника зависит магнитная проницаемость μ стали, которая резко уменьшается при насыщении (рис. 1,в). Магнитная проницаемость непосредственно влияет на индуктивность рабочей обмотки:

где k— постоянный коэффициент,
а следовательно, и на ее индуктивное сопротивление:

Таким образом, увеличение тока Iу и потока Фу приводит к уменьшению магнитной проницаемости μ сердечника (происходит вытеснение переменного потока рабочей обмотки из сердечника), уменьшению индуктивного сопротивления рабочей обмотки Хр и к увеличению тока нагрузки Iн. Увеличение тока нагрузки будет происходить с увеличением тока управления до насыщения сердечника. С насыщением стали дальнейшее увеличение тока управления практически не изменяет ток нагрузки.
Зависимость тока нагрузки МУ от тока управления называется статической нагрузочной характеристикой (рис. 1,г). Из характеристики видно, что изменение тока нагрузки не зависит от полярности входного сигнала.
Переменный ток рабочей обмотки создает в сердечнике переменный магнитный поток, который наводит в обмотке управления переменную э. д. с., в результате чего работа дросселя насыщения в режиме МУ будет неустойчива.
Реальный МУ состоит из двух дросселей насыщения, обмотки которых соединены между собой таким образом, что устраняется вредное влияние переменной э. д. с.
На рис. 2 показан МУ с встречно-последовательным включением рабочих обмоток ОР1 и ОР2 и общей обмоткой управления ОУ, размещенных на двух Ш-образных сердечниках. Встречное включение рабочих обмоток позволяет скомпенсировать переменные э. д. с., наводимыми в обмотке ОУ. Существуют и другие схемы соединения обмоток МУ.
Степень усиления МУ характеризуется коэффициентами усиления, которые относятся к числу основных показателей МУ. Коэффициент усиления по мощности представляет собой отношение мощности на выходе Рн к мощности на входе Ру, т. е.:
Для увеличения коэффициента усиления применяются МУ с положительными внутренними или внешними обратными связями.
Внутренняя обратная связь получается за счет намагничивания сердечника постоянной составляющей тока нагрузки при включении рабочей обмотки через выпрямитель. Внешняя обратная связь получается за счет применения в МУ дополнительной обмотки управления, подключаемой на выпрямленное напряжение, пропорциональное току нагрузки. Применяют также отрицательные обратные связи, уменьшающие коэффициент усиления. Для изменения коэффициента усиления и пределов регулирования в МУ часто применяют положительное и отрицательное смещения.
В схемах, где требуется изменение полярности выходного сигнала с изменением полярности сигнала управления, применяют реверсивные (двухтактные) МУ. Реверсивный МУ состоит из двух простых МУ, выходы которых включены на общую нагрузку встречно. При положительном сигнале управления преобладает выход одного МУ, а при отрицательном — другого. Результирующий выход реверсивного МУ определяют суммированием сигналов выхода простых МУ; при отсутствии управляющего сигнала он равен нулю.