Сервопривод — схема, характеристики, назначение
Сервопривод – механизм, позволяющий устанавливать и фиксировать рабочий орган оборудования в заданных положениях, перемещать его в соответствии с заданной программой. Перемещение не единственная задача устройств, они могут поддерживать необходимый момент на валу при нулевой скорости вращения вала. Это используется для удержания исполнительного механизма в одном положении под нагрузкой.
Сервоприводы устанавливают на станках с ЧПУ, грузоподъемных механизмах, промышленных роботах. Сфера применения сервопривода не ограничивается производством. Механизмы применяют в бытовой технике, системах отопления и кондиционирования, автотранспорте.

Конструкция
Конструкция сервоприводов может существенно различаться в зависимости от назначения. Однако, вне зависимости от области применения устройства содержат следующие узлы:
- Передаточный механизм.
- Электродвигатель.
- Датчики положения и скорости вращения вала.
- Частотный преобразователь.
- Контроллер.
Передаточный механизм служит для изменения скорости и момента на валу, к нему непосредственно подключается рабочий инструмент или исполнительное устройство. В ряде случаев передаточные механизмы обходятся дешевле безредукторного регулирования.

Электродвигатель – силовой элемент привода. Энергия вращения вала преобразуется в перемещение исполнительных устройств или инструментов.
Датчики служат для передачи на схему управления сигнала о положении вала или исполнительного механизма, частоты его вращения, момента.
Частотный преобразователь применяется для изменения частоты вращения, момента на валу двигателя путем изменения частоты тока или напряжения питания электродвигателя.

Контроллер предназначен для задания режимов работы привода, обработки сигналов с датчиков обратной связи, управления положением исполнительного механизма. Этот элемент нередко объединен с преобразователем частоты. Существуют специализированные ПЧ с интегрированными контроллерами для управления серводвигателями.
Принцип работы сервоприводов
Работает устройство следующим образом. Контроллер программируется на определенный режим работы и выдает сигнал на преобразователь частоты. Устройство подает на электродвигатель напряжение необходимой частоты и величины. Силовой агрегат перемещает исполнительный механизм с заданной скоростью и моментом, соответствующим нагрузке. По достижении заданного положения рабочего органа, подается соответствующий сигнал с датчиков положения на контроллер, который останавливает двигатель.
Принцип действия сервопривода идентичен автоматическому регулятору с отрицательной обратной связью. Задается опорный сигнал, называемый нулевым, с которым сравнивается сигнал с датчика положения. При равенстве их величин, сервопривод останавливается, при отклонениях в отрицательную или положительную сторону, на двигатель подается напряжение пока рабочий инструмент или исполнительное устройство не займет требуемого положения.
Виды сервоприводов
Сервоприводы различают по типу применяемого двигателя, передаточного механизма, назначению и техническим параметрам.
В качестве силовых агрегатов в устройствах используют:
- Двигатели постоянного тока.
- Асинхронные электрические моторы.
- Синхронные двигатели с обмотками статора или на постоянных магнитах.
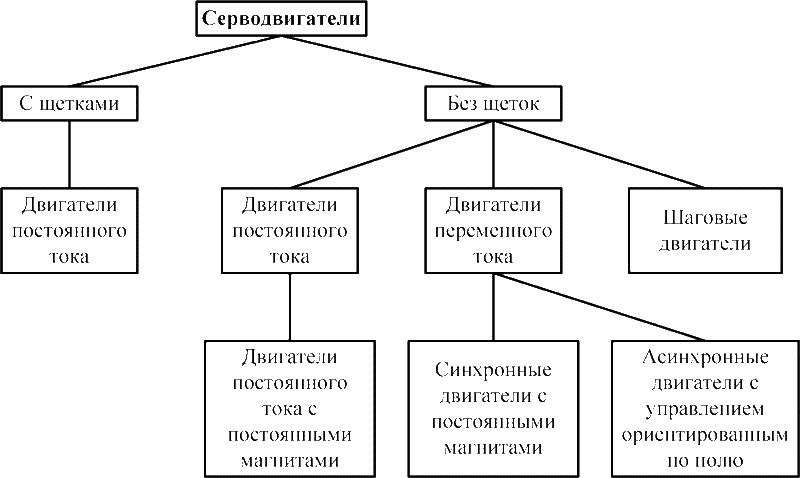
Дополненная классификация двигателей сервоприводов представлена на рисунке:
К двигателям для современных сервоприводов предъявляют следующие требования:
- Высокая точность отработки управляющего сигнала. Электрические машины должны обладать низкой инерцией, иметь неизменные механические характеристики во всем диапазоне регулирования скорости.
- Обеспечивать неравномерность частоты вращения. Часть технологического оборудования регулируется по нелинейным законам, двигатель должен обеспечить их реализацию с минимальными ошибками.
- Иметь достаточную перегрузочную способность. Двигатель не должен перегреваться, выходить из строя при превышении нагрузки на валу.
- Обеспечивать высокую динамику. Скорость реакции силового агрегата сервопривода должна быть достаточной для нормального функционирования оборудования.
- Управляться как можно более простыми алгоритмами. Цена контроллера и ПО составляет значительную часть стоимости сервопривода. Упрощение управления без ущерба характеристикам позволяет снизить стоимость электроники.
В первых сервоприводах применялись электродвигатели постоянного тока с аналоговыми тахогенераторами, тиристорными или транзисторными преобразователями напряжения. Широкое использование таких электрических машин связано с относительно простым управлением. Скорость вращения напрямую зависит от величины напряжения, подаваемого на якорь, жесткость механических характеристик сохраняется во всем диапазоне угловой частоты ротора.
К недостаткам сервоприводов относятся: необходимость установки выпрямителя с преобразователем напряжения, высокая цена двигателей, наличие коллекторного узла, снижающего надежность схемы.
С появлением преобразователей частоты стало возможным применение в сервоприводах асинхронных двигателей. ПЧ с микроконтроллером позволяет реализовать практически любые законы регулирования с обратной связью по относительному и абсолютному положению ротора, моменту и скорости вращения.
Главное преимущество сервоприводов с асинхронными двигателями – относительно низкая цена. При значительных мощностях такие устройства намного дешевле сервоприводов с электродвигателями постоянного тока.
Следующий тип силовых агрегатов – синхронные двигатели. С появлением современных материалов для постоянных магнитов, которые не теряют свойств при нагреве и ударах, наибольшее распространение для сервоприводов получили синхронные электродвигатели на постоянных магнитах или СДПМ.
Главное достоинство таких электрических машин – маленькие размеры. Так, двигатель той же мощности синхронного типа с роторными обмотками имеет габариты в 2 раза превышающие размеры СДПМ.
Кроме того, такие электродвигатели:
- Обладают высоким к.п.д. во всем диапазоне скоростей вращения.
- Имеют возможность поддерживать заданный момент на валу независимо от нагрузки.
- Отличаются относительно простой конструкцией.
- Обладают невысокой инерцией.
В СДМП отсутствуют потери на возбуждение. Сфера применения электрических машин – сервоприводы малой и средней мощности, в том числе с очень высокими требованиями к стабильности скорости вращения.
Сфера применения сервоприводов
Оборудование применяется в различных автоматических устройствах и установках. Сервоприводы устанавливают:
- В промышленных роботах и манипуляторах.
- В грузоподъемном и упаковочном оборудовании.
- В автоматизированных станках.
- В особо точных исполнительных механизмах систем автоматического регулирования технологических параметров.
- В автоматических автомобильных трансмиссиях.
Сервоприводы позволяют повысить точность и производительность промышленного оборудования, автоматизировать производственные процессы, исключить влияние человеческого фактора.
Функции современных сервоприводов
Большинство сервоприводов поставляют в виде готовых систем сервоусилитель-датчик- двигатель. Крупные производители, например Mitsubishi Electric, Schneider Electric предлагают сервисы выбора совместимых элементов.
Современные сервоприводы обеспечивают не только точное полеориентированное управление. Устройства:
- Могут встраиваться в АСУТП любой сложности, а также поддерживают автономное управление. Оборудование обеспечивает связь по унифицированным цифровым, аналоговым сигналам, безпотенциальным контактам, интерфейсам CANopen, PROFIBUS DP, RS 485, DeviceNet, EtherCAT, Modbus TCP, Ethernet Powerlink и другим.
- Легко осваиваются пользователями. Настройка устройств не представляет сложности, управление имеет интуитивно понятный интерфейс. Сервоприводы уже укомплектованы заводским ПО, имеет функции автоматического распознавания внешнего оборудования. При необходимости можно скачать нужные программы или обновить их с сервера производителя.
- Можно масштабировать и модернизировать. Ряд сервоприводов промышленного назначения имеет отрытую архитектуру. Оборудование легко адаптируется путем установки дополнительных элементов: датчиков, модулей и других.
- Имеют защиту от ненормальных режимов работы. Сервоприводы обеспечивают отключение при превышении допустимого значения тока, колебаний или отключения напряжения в сети, перегрузок при динамическом торможении. Оборудование также имеет защиту от перегрева электродвигателя, ошибок датчика, превышения допустимого рассогласования. Для поиска причины возникновения ненормального режима сервоприводы автоматически записывают время и дату аварии, код предположительной причины.
Современные сервосистемы отличаются разнообразием. Выпускают устройства для несложного оборудования с алгоритмом управления по 1оси, до сложных роботов с многоосевым управлением.
Как выбрать сервопривод
Сервоприводы выбирают по техническим характеристикам, экономического и технического эффекта. Выбор делают после тщательного анализа технологических требований, расчетов эффективности и надежности.
Один из главных параметров устройств – точность позиционирования. Она не должна превышать предельную погрешность положения исполнительных механизмов или перемещения рабочего инструмента. Точность определяется количеством импульсов с датчиков на 1 оборот вала. Чем их больше, тем точнее обеспечивается положение вала.

При выборе необходимо обратить внимание на диапазон регулирования скорости и момента на валу. Параметры подбирают по требованиям оборудования. Например, сервопривод автоматизированных станков должен обеспечивать требуемую скорость обработки для того или иного материала. Момент вала на валу выбирают по характеру и величине нагрузки. Для исключения перегрузок лучше прибрести сервопривод привод с небольшим запасом мощности двигателя.
Кроме точности позиционирования, диапазона изменения момента и скорости, также учитывают:
- Тип поддерживаемых интерфейсов обмена данными. Протоколы должны соответствовать информационным интерфейсам автоматизированной системы. Сервоприводы поддерживают самые распространенные протоколы обмена информацией. В модульных устройствах можно устанавливать дополнительные блоки связи.
- Скорость отклика. Один из самых главных параметров , характеризующих время между выработкой сигнала управления и его полной отработкой. Скорость отклика также должна отвечать требованиям оборудования или механизма.
- Исполнение. Класс защиты от влаги пыли, тип охлаждения выбирают исходя из предполагаемых условий эксплуатации.
- Электрические параметры. Номинальное напряжение, потребляемый ток, выбирают по возможностям и виду электросети.
- Дополнительным функциям. Современные сервоприводы выполняют функции отключения при авариях, предупреждений при ненормальных режимов работы, ведения журнала и многие другие.
От привода зависит работоспособность технологических установок, оборудования, станков. Производители промышленной приводной техники оказывают услуги выбора сервоприводов с учетом всех требований. Рекомендуется воспользоваться этим предложением.

Современные сервоприводы обеспечивают управление по законам любой сложности с точностью перемещения до сотых долей микрон. Оснащение устройствами промышленного оборудования дает очень весомый экономический эффект. Сервоприводы также позволяют существенно расширить возможности и увеличить точность станков, дозаторов, манипуляторов, а также автоматизировать работу устройств.
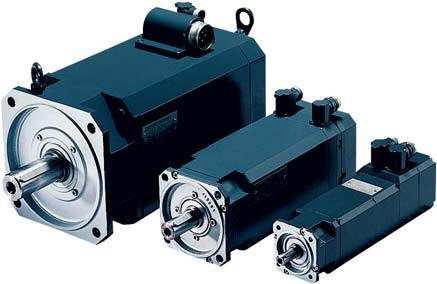
Конструкция серводвигателя. Коллекторный или бесщеточный?

Серводвигатели имеют широкий спектр применений в промышленном оборудовании. В ЧПУ их используют в приводах перемещения, для которых требуется точность позиционирования, работа на высоких ускорениях, управляемость, постоянство момента на разных скоростях и компактные размеры. Существует два типа серводвигателей: щеточные и бесщеточные. Для тех, кто впервые сталкивается с электроприводом, разница между ними не очевидна, но она есть и может повлиять на удобство работы и частоту обслуживания. Чтобы найти подходящее решение, которое будет удовлетворять условиям эксплуатации станка с ЧПУ, нужно понимать ключевые различия в конструкции и работе этих двигателей.
Что такое серводвигатель?
Серводвигатель для ЧПУ представляет собой электрический мотор с обратной связью по положению. Он получает управляющий сигнал, по которому изменяет положение ротора на заданную величину, следит за этим изменением и управляет параметрами питания. Наличие обратной связи — главное отличие сервомоторов от шаговых двигателей, в которых используется система отсчета шагов для определения перемещений.
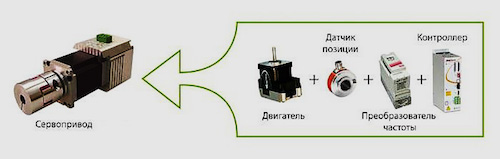
Сервопривод состоит из следующих элементов:
- электрический мотор;
- датчик положения ротора (в приводах станков с ЧПУ чаще всего используют датчики Холла или энкодеры);
- конвертер управляющего сигнала;
- блок питания (инвертор или частотный преобразователь).
Принцип работы серводвигателя с простейшей схемой управления основан на сравнении задаваемого перемещения с показаниями датчика обратной связи. Напряжение на обмотки подаются через реле. В приводах перемещения ЧПУ используются более сложные схемы управления, построенные на логических контроллерах. У них есть ряд преимуществ, важных для работы станка:
- возможность выбрать мощность в соответствии с задачами;
- автоматическая компенсация люфтов, зазоров, связанных с износом, сезонных и рабочих температурных деформаций;
- мгновенное выявление отказа — заклинивания, выхода из строя электронных компонентов;
- высокие скорости перемещения, недоступные для шаговых двигателей.
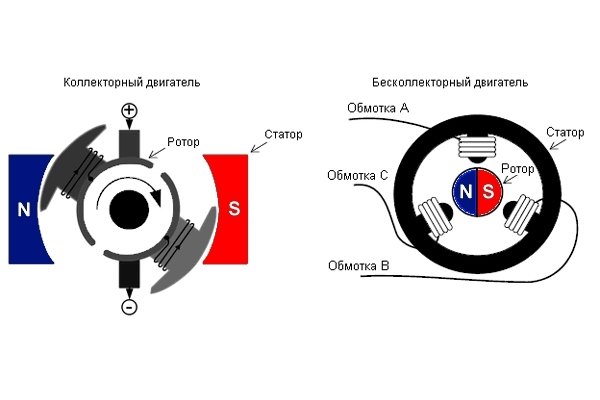
Конструкции щеточных и бесщеточных серводвигателей
Мы предлагаем рассмотреть основные различия в устройстве коллекторного и бесколлекторного серводвигателя, чтобы понять их преимущества и недостатки. Оба представляют собой электрические моторы, состоящие из ротора (вращающейся части) и статора (неподвижной части). Источником энергии для них служит электричество, подаваемое с трансформатора станка.
Щеточный электромотор
В статоре простейшего щеточного электродвигателя находится пара постоянных магнитов с противоположной полярностью. На его роторе, по бокам от оси, находятся две катушки с витками, намотанными в противоположные стороны. При подаче электричества катушки превращаются в электромагниты с разной полярностью. Притяжение между постоянными магнитами и электромагнитами, которые объясняются силой Лоренца, заставляет ротор вращаться. При их максимальном сближении силы Лоренца ослабевают, а ротор останавливается. Чтобы вращение продолжалось, в момент сближения магнитов происходит переключение полярности обмоток. Ближайшие друг к другу постоянный и электрический магниты уже имеют одноименную полярность, и вращение продолжается за счет их отталкивания. Если такое изменение полярности будет происходить циклически, вращение ротора будет продолжаться, а двигатель будет совершать полезную работу.
За переключение полярности обмоток отвечает коллекторно-щеточный узел. Он состоит из двух элементов:
Коллектор — токопроводящее кольцо, разделенное на сегменты изоляторами. Чаще всего изготавливается из медной проволоки. В роторах большинства щеточных моторов намотано несколько пар катушек, каждая из них подключена к «своим» сегментам на кольце. Щетки — проводники, к которым подводится сетевое питание.
Щетки закреплены на статоре неподвижно и пожимаются пружинами к коллектору. Коммутация (переключение обмоток) выполняется при проворачивании ротора: щетки последовательно соприкасаются с сегментами коллектора.
Щетки изготавливаются из графита, медно-графитного или медно-серебряного сплавов. Они являются самосмазывающимися, то есть имеют сравнительно невысокий коэффициент трения. Эксплуатация коллекторного двигателя требует регулярного осмотра коллекторно-щеточного узла. Щетки — изнашиваемые детали, которым требуется замена с определенной периодичностью. Нарушение электрического контакта при выработке приводит к искрению. Силы трения, возникающие в узле, несколько снижают КПД привода, приводят в нагреву, а для его охлаждения на вал ротора устанавливают крыльчатку (центробежный вентилятор).
Главное преимущество щеточного мотора — простота в управлении. Для них не нужно создавать сложных электронных систем. Мотор отличается сравнительно невысокой стоимостью и при регулярном обслуживании работает стабильно.
.jpg)
Бесщеточный электромотор
В бесщеточном серводвигателе постоянные магниты установлены на роторе, а катушки электромагнитов — на статоре. Чтобы полюса постоянно находились в оппозиции, обмотки статора коммутируются электронными ключами. Питание на катушки подается последовательно, и за согласование магнитные полей постоянного и электрического магнитов отвечает датчик положения, также называемый датчиком Холла. Это общий принцип работы для всех бесщеточных серводвигателей: постоянного и переменного тока.
Ключевое преимущество этого вида моторов заложено в отсутствии изнашиваемых токоведущих частей. Фактически ресурс такого электродвигателя ограничен расчетным сроком службы подшипников. Из-за отсутствия коллекторного узла размеры и вес бесщеточного мотора меньше в сравнении со щеточным аналогичной мощности. Из-за отсутствия трения возможна работа на более высоких частотах вращения. Двигатели без коллектора отличаются более низким уровнем шумов, могут работать в условиях запыленности, в атмосфере горючих газов.
Управление скоростью реализовано на базе электронного регулятора хода. В отличие от щеточных моторов, где для ограничения частоты вращения используется обычный резистор, переводящий избыточную мощность в тепло, здесь нет нагрева.
Сервопривод на основе бесщеточного двигателя имеет свои недостатки:
- требует организации более сложной системы управления на основе контроллера;
- стоит дороже.
Большинство бесколлекторных двигателей имеет трехфазное питание и три датчика положения (по одному на фазу).
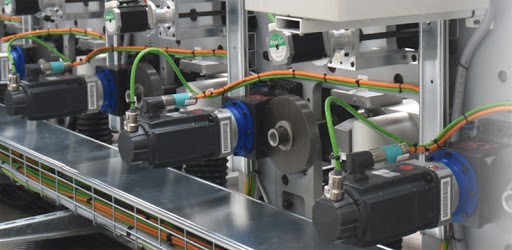
Серводвигатели в станках MULTICUT
Компания MULTICUT производит фрезерно-гравировальные станки портального типа, предназначенные для обработки материалов различной твердости. Мы разработали пять серий станков, рассчитанных на разные нагрузки. Одно из преимуществ оборудования — возможность выбора приводов перемещения. На станки в базовой комплектации установлены шаговые электродвигатели. При необходимости их можно заменить сервоприводами переменного тока ведущих производителей промышленной автоматики и приводных систем:
DELTA. Серводвигатели серии ASDA-B2 в диапазоне мощностей от 100 Вт до 3 кВт отличаются высокой точностью работы благодаря встроенному энкодеру с разрешением 160000 импульсов на оборот. В моделях мощностью от 400 Вт есть встроенный тормозной резистор. Привод отличается улучшенной динамикой разгона. Время разгона от -3000 до +3000 об/мин на холостом ходу составляет менее 10 мс. ESTUN. Сервоприводы серии EMG разработаны для мощных и станков, от которых требуется высокая производительность. Благодаря мощным постоянным магнитам, в которых использованы редкоземельные металлы, производителю удалось добиться высоких мощностных характеристик при компактных размерах и широкого диапазона частот вращения. Встроенный инкрементный или абсолютный энкодер обеспечивает высокую точность позиционирования и быстрый отклик системы на изменение параметров.
В приводах реализована возможность управления по заданию положением, скоростью и моментом. Последние два параметра также управляются по внутренним параметрам.
Задать вопросы по выбору приводов перемещения для станков MULTICUT можно консультанту в онлайн чате или по телефону.
Принципы работы и виды сервоприводов
Отличительной особенностью сервопривода является возможность управления через отрицательную обратную связь с использованием заданных параметров. Все оборудование данного типа можно разделить на две группы – сервоприводы постоянного тока и трехфазные сервоприводы переменного тока.
Устройство сервоприводов постоянного тока
Как правило, сервоприводы постоянного тока используются в маломощных устройствах позиционирования. Классическая область их применения – робототехника.
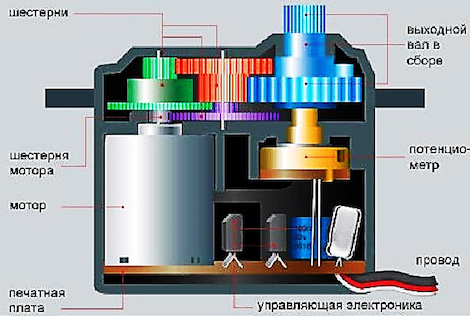
Конструкция современных сервоприводов довольно проста, но при этом весьма эффективна, так как позволяет обеспечить максимально точное управление движением. Сервопривод состоит из:
- двигателя постоянного тока
- шестерни редуктора
- выходного вала
- потенциометра
- платы управления, на которую подается управляющий сигнал
Двигатель и редуктор образуют привод. Редуктор используется для снижения скорости вращения двигателя, которую необходимо адаптировать для практического применения. К выходному валу редуктора крепится необходимая нагрузка. Это может быть качалка, вращающийся вал, тянущие или толкающие механизмы.
Для того, чтобы угол поворота превратить в электрический сигнал, необходим датчик. Его функции в сервоприводе постоянного тока с успехом выполняет потенциометр. Он выдает аналоговый сигнал (как правило, от 0 до 10 В) с дискретностью, ограниченной АЦП (аналогово-цифровым преобразователем), на который поступает этот сигнал.
Самой важной деталью сервопривода, пожалуй, является электронная плата сервоусилителя, которая принимает и анализирует управляющие импульсы, соотносит их с данными потенциометра, отвечает за запуск и выключение двигателя.
Принцип работы
Принцип действия устройств основан на использовании импульсного сигнала, который имеет три важные характеристики – частоту повторения, минимальную и максимальную продолжительность. Именно продолжительность импульса определяет угол поворота двигателя.
Импульсные сигналы, получаемые сервоприводом, имеют стандартную частоту, а вот их продолжительность в зависимости от модели может составлять от 0,8 до 2,2 мс. Параллельно с поступлением управляющего импульса активируется работа генератора опорного импульса, который связан с потенциометром. Тот, в свою очередь, механически сопряжен с выходным валом и отвечает за корректирование его положения.
Электронная схема анализирует импульсы с учетом длительности и на основе разностной величины определяет разницу между ожидаемым (заданным) положением вала и реальным (измеренным при помощи потенциометра). Затем производится корректировка путем подачи напряжения на питание двигателя.
Основные положения устройства
Если продолжительность опорного и управляющего импульсов совпадает, наступает так называемый нулевой момент. В это время двигатель сервопривода не работает, вал привода находится в исходном (неподвижном) положении.
При увеличении длительности управляющего импульса плата фиксирует разбежку показателей, двигатель получает напряжение и приходит в движение. В свою очередь, редуктор начинает воздействовать на выходной вал, который поворачивается таким образом, чтобы достигнуть увеличения продолжительности опорного импульса. Как только он сравняется с управляющим импульсом, двигатель прекратит свою работу.
При уменьшении длительности управляющего импульса происходит все то же самое, только с точностью до наоборот, так как двигатель начинает вращаться в обратную сторону. Как только импульсы сравнялись, двигатель останавливается.
Сервопривод переменного тока
В сервоприводах переменного тока используется синхронный двигатель с мощными постоянными магнитами. В таких двигателях частота вращения ротора совпадает с частотой вращения магнитного поля, наводимого в обмотке статора.
Принцип работы сервопривода на основе трехфазного синхронного электродвигателя состоит в следующем. На обмотки статора поступает трехфазное напряжение, которое создает внутри него вращающееся магнитное поле. Это поле взаимодействует с постоянными магнитами, расположенными в роторе. В результате ротор вращается с частотой магнитного поля.
На валу ротора закреплен энкодер с высокой разрешающей способностью. Сигнал от него поступает по отдельному кабелю на специальный вход сервоусилителя. В то же время на управляющий вход сервоусилителя подается сигнал управления. В результате сравнения этих двух сигналов выделяется сигнал рассогласования, величина которого прямо пропорциональна разнице между целевыми и актуальными показателями вращения двигателя. На основании данного сигнала формируется трехфазное напряжение с такими параметрами, которые обеспечивают максимально быстрое уменьшение рассогласования до нуля.
Режимы управления
Существуют три основных режима работы сервопривода переменного тока.
Режим управления положением. Главное в этом режиме – контроль за углом поворота вала ротора. Управление производится последовательностью импульсов, которые могут приходить, например, с контроллера. Этот режим используется для точного позиционирования различных узлов технологического оборудования.
Комбинация импульсов для управления положением может передавать информацию не только по положению, но также по скорости и направлению вращения двигателя. Для этого могут использоваться три типа сигналов: 1) квадратурные импульсы (со сдвигом фаз на 90 градусов), 2) импульсы вращения по или против часовой стрелки, действующие поочередно и 3) импульсы скорости и потенциал направления, подающиеся на два входа.
Как правило, во всех сервоусилителях входы управления именуются как PULSE, SIGN.
Режим управления скоростью. В данном случае управление производится аналоговым сигналом. Значения скорости также могут переключаться на фиксированные величины подачей сигналов на соответствующие дискретные входы. В случае использования разнополярного аналогового управляющего сигнала возможна смена направления вращения серводвигателя.
Режим управления скоростью схож с работой асинхронного двигателя, управляемого преобразователем частоты. Задаются такие параметры, как время разгона и замедления, максимальная и минимальная скорости и другие.
Режим управления моментом.
В этом режиме двигатель может вращаться либо стоять на месте, но при этом момент на валу будет заданным. Управление может производиться дискретным либо аналоговым двухполярным сигналом. Этот режим может использоваться для машин, где необходимо менять усилие прижима, давление и т. п.
Оценка текущего момента двигателя, необходимого для управления, производится за счет встроенного датчика тока.
Процесс рекуперации
Рекуперация происходит при изменении направления (знака) момента нагрузки по отношению к вращающему моменту серводвигателя. Если энергия рекуперации невелика, она накапливается на конденсаторах звена постоянного тока, повышая напряжение на них.
Если разница абсолютных значений моментов нагрузки и серводвигателя составляет значительную величину, напряжение на конденсаторах шины постоянного тока может превысить пороговый уровень. В этом случае энергия рекуперации сбрасывается в тормозной резистор.
Сервопривод
В конструкциях оборудования, создаваемого на базе высоких технологий, постоянно развиваются и совершенствуются различные автоматические процессы. Среди них широкое распространение получил сервопривод, устанавливаемый с целью совершения отдельными элементами и деталями постоянных динамических движений. Эти устройства обеспечивают постоянный контроль над углами поворота вала, устанавливают нужную скорость в приборах электромеханического типа.
Составной частью этих систем являются серводвигатели, которые дают возможность управлять скоростями в нужном диапазоне в установленный промежуток времени. Таким образом, все процессы и движения могут периодически повторяться, а частота этих повторов закладывается в системе управления.
- Устройство сервопривода
- Как работает сервопривод
- Управление серводвигателем
- Виды и характеристики
- Плюсы и минусы сервомоторов
Устройство сервопривода
Основные детали, из которых состоит типовой серводвигатель – ротор и статор. Для коммутации применяются специальные комплектующие в виде штекеров и клеммных коробок. Управление, контроль и коррекция процессов осуществляется с помощью отдельного управляющего узла. Для включения и выключения сервопривода используется отдельная система. Все детали, помещаются в общем корпусе.
Практически во всех сервоприводах имеется датчик, работающий и отслеживающий определенные параметры, такие как положение, усилие или скорость вращения. С помощью управляющего блока поддерживается автоматический режим необходимых параметров при работе устройства. Выбор того или иного параметра происходит в зависимости от сигналов, поступающих от датчика в установленные промежутки времени.
Разница между сервоприводом и обычным электродвигателем заключается в возможности установки вала в точно заданное положение, измеряемое в градусах. Установленное положение, так же, как и другие параметры, поддерживаются блоком управления.
Их принцип работы заключается в преобразовании электрической энергии в механическую, с помощью электродвигателя. В качестве привода используется редуктор, позволяющий снизить скорость вращения до требуемого значения. В состав данного устройства входят валы с шестернями, преобразующими и передающими крутящий момент.
Как работает сервопривод
Вращение выходного вала редуктора, связанного шестернями с сервоприводом, осуществляется путем запуска и остановки электродвигателя. Сам редуктор необходим для регулировки числа оборотов. Выходной вал может быть соединен с механизмами или устройствами, которыми необходимо управлять. Положение вала контролируется с помощью датчика обратной связи, способного преобразовывать угол поворота в электрические сигналы и на котором построен принцип работы всего устройства.
Этот датчик известен также, под названием энкодера или потенциометра. При повороте бегунка, его сопротивление будет изменяться. Изменения сопротивления находится в прямой пропорциональной зависимости с углом поворота энкодера. Данный принцип работы позволяет устанавливать и фиксировать механизмы в определенном положении.
Дополнительно каждый серводвигатель имеет электронную плату, обрабатывающую внешние сигналы, поступающие от потенциометра. Далее выполняется сравнение параметров, по результатам которого производится запуск или остановка электродвигателя. Следовательно, с помощью электронной платы поддерживается отрицательная обратная связь.

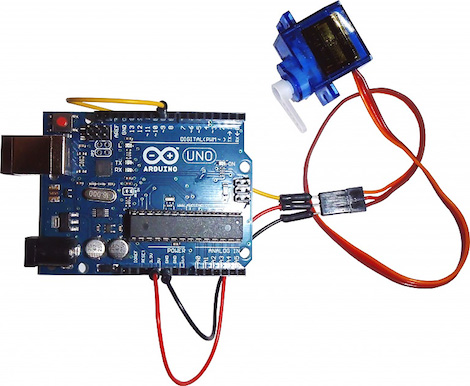
Подключить серводвигатель можно с помощью трех проводников. По двум из них подается питание к электродвигателю, а третий служит для прохождения сигналов управления, приводящих вал в определенное положение.
Предотвратить чрезмерные динамические нагрузки на электродвигатель возможно с помощью плавного разгона или такого же плавного торможения. Для этого применяются более сложные микроконтроллеры, обеспечивающие более точный контроль и управление позицией рабочего элемента. В качестве примера можно привести жесткий диск компьютера, в котором головки устанавливаются в нужную позицию с помощью точного привода.
Управление серводвигателем
Основное условие, чтобы серводвигатель мог нормально работать, заключается в их функционировании совместно с так называемой системой G-кодов. Эти коды представляют собой набор команд управления, заложенный в специальную программу.
Если в качестве примера взять ЧПУ – числовое программное управление, то в данном случае сервоприводы будут взаимодействовать с преобразователями. В соответствии с уровнем входного напряжения они способны изменить значение напряжения на возбуждающей обмотке или якоре электродвигателя.
Непосредственное управление серводвигателем и всей системой осуществляется из одного места – блока управления. Когда отсюда поступает команда на прохождение определенного расстояния по оси координат Х, в цифровом аналоговом преобразователе возникает напряжение определенной величины, которое и поступает в качестве питания привода этой координаты. В серводвигателе начинается вращательное движение ходового винта, связанного с энкодером и исполнительным органом основного механизма.
В энкодере вырабатываются импульсы, подсчитываемые блоком, выполняющим управление сервоприводом. В программе заложено соответствие определенного количества сигналов с энкодера, установленному расстоянию, которое должен пройти исполняющий механизм. В нужное время аналоговый преобразователь, получив установленное число импульсов, прекращает выдачу выходного напряжения, в результате, серводвигатель останавливается. Точно так же под влиянием импульсов восстанавливается напряжение, и возобновляется работа всей системы.
Виды и характеристики
Серводвигатели выпускаются в самых разных вариантах, позволяющих использовать их во многих областях. Основные конструкции разделяются на коллекторные и бесколлекторные, предназначенные для работы от постоянного и переменного тока.
Кроме того, каждый сервомотор может быть синхронным и асинхронным. Синхронные устройства обладают способностью задавать высокоточную скорость вращения, а также углы поворотов и ускорение. Эти приводы очень быстро набирают номинальную скорость вращения. Сервоприводы в асинхронном исполнении управляются за счет изменения параметров питающего тока, когда его частота меняется с помощью инвертора. Они с высокой точностью выдерживают заданную скорость даже при самых низких оборотах.

В зависимости от принципиальной схемы и конструкции, сервоприводы могут быть электромеханическими и электрогидромеханическими. Первый вариант, включающий редуктор и двигатель, отличается низким быстродействием. Во втором случае действие происходит очень быстро за счет движения поршня в цилиндре.
Каждый сервопривод характеризуется определенными параметрами:
- Крутящий момент или усилие, создаваемое на валу. Считается наиболее важным показателем работы сервопривода. Для каждой величины напряжения существует собственный крутящий момент, отражаемый в паспорте изделия.
- Скорость поворота. Данный параметр представляет собой определенный период времени, который требуется, чтобы изменить позицию выходного вала на 600. Эта характеристика также зависит от конкретного значения напряжения.
- Максимальный угол поворота, на который может развернуться выходной вал. Чаще всего эта величина составляет 180 или 3600.
- Все сервоприводы разделяются на цифровые и аналоговые. В зависимости от этого и осуществляется управление сервоприводом.
- Питание серводвигателей. В большинстве моделей используется напряжение от 4,8 до 7,2В. Питание и управление осуществляется с помощью трех проводников.
- Возможность модернизации в сервопривод постоянного вращения.
- Материалы для редуктора могут использоваться самые разные. Шестерни изготавливаются из металла, карбона, пластика или комбинированных составов. Каждый из них обладает своими преимуществами и недостатками. Например, пластиковые детали плохо выдерживают ударные нагрузки, но устойчивы к износу в процессе длительной эксплуатации. Металлические шестерни, наоборот, быстро изнашиваются, зато они обладают высокой устойчивостью к динамическим нагрузкам.
Плюсы и минусы сервомоторов
Благодаря унифицированным размерам, эти устройства легко и просто устанавливаются в любые конструкции. Они безотказны и надежны, каждый из них работает практически бесшумно, что имеет большое значение при их эксплуатации на сложных и ответственных участках. Даже на невысоких скоростях можно добиться точности и плавных перемещений. Каждый сервопривод может быть настроен персоналом, в зависимости решения тех или иных задач.
В качестве недостатков отмечаются определенные сложности при настройках и сравнительно высокая стоимость.

Сервопривод для теплого пола
Управление шаговым двигателем

ЩСУ – щит станций управления
Ремонт люстры с пультом управления
Шаговый двигатель. Принцип работы
Принцип работы частотного преобразователя для асинхронного двигателя
Серводвигатели против шаговых двигателей
Серводвигатели против шаговых двигателей.
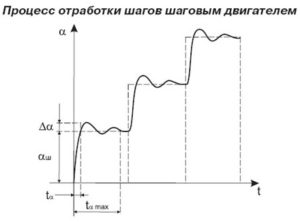
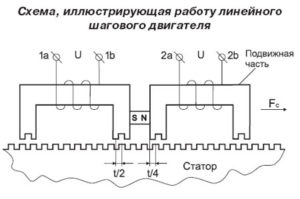
Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.

Шаговые двигатели можно отнести к группе бесколлекторных двигателей постоянного тока. Шаговые двигатели, имеют высокую надежность и большой срок службы, что позволяет использовать их в индустриальных применениях. При увеличении скорости двигателя, уменьшается вращающийся момент.
Шаговые двигатели делают больше вибрации, чем другие типы двигателей, поскольку дискретный шаг имеет тенденцию хватать ротор от одного положения к другому. За счет этого шаговый двигатель во время работы очень шумный. Вибрация может быть очень сильная, что может привести двигатель к потери момента. Это связано с тем, что вал находится в магнитном поле и ведет себя как пружина. Шаговые двигатели работают без обратной связи, то есть не используют Энкодеры или резольверы для определения положения.
Типы:
Существует четыре главных типа шаговых двигателей:
- Шаговые двигателя с постоянным магнитом
- Гибридный шаговые двигателя
- Двигатели с переменным магнитным сопротивлением
- Биполярные и униполярные шаговые двигатели
Преимущества Шагового двигателя:
- Устойчив в работе
- Работает в широком диапазоне фрикционных и инерционных нагрузок и скоростей, скорость пропорциональна частоте входных импульсов.
- Нет необходимости в обратной связи
- Намного дешевле других типов двигателей
- Подшипники — единственный механизм износа, за счет этого долгий срок эксплуатации.
- Превосходный крутящий момент при низких скоростях или нулевых скоростях
- Может работать с большой нагрузкой без использования редукторов
- Двигатель не может быть поврежден механической перегрузкой
- Возможность быстрого старта, остановки, реверсирования
Главным преимуществом шаговых приводов является точность. При подаче потенциалов на обмотки, шаговый двигатель повернется строго на определенный угол. Шаговый привод, можно приравнять к недорогой альтернативе сервоприводу, он наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика.
Недостатки шагового двигателя:
- Постоянное потребление энергии, даже при уменьшении нагрузки и без нагрузки
- У шагового двигателя существует резонанс
- Из-за того что нет обратной связи, можно потерять положение движения.
- Падение крутящего момента на высокой скорости
- Низкая ремонтопригодность
Применение.
Шаговые двигателя имеет большую область применения в машиностроении, станках ЧПУ, компьютерной технике, банковских аппаратах, промышленном оборудовании, производственных линиях, медицинском оборудовании и т.д.
Что такое серво двигатель и принцип его работы:

Серводвигателя делятся на категории щеточные (коллекторные) и без щеточные (без коллекторные) . Щеточные (коллекторные) серводвигатели могут быть постоянного тока, без коллекторные серводвигатели могут быть постоянного и переменного тока. Серводвигатели с щетками (коллекторные), имеют один недостаток каждые 5000 часов необходима замена щеток. На серводвигателях всегда есть обратная связь, это может быть энкодер или резольвером. Обратная связь необходима, чтобы достичь необходимой скорости, либо получить нужный угол поворота. В случаях высоких нагрузок и если скорость окажется ниже требуемой величины, ток пойдет на увеличение , пока скорость не достигнет нужной величины, если сигнал скорости покажет, что скорость больше, чем нужно, ток, пойдет на уменьшение. При использовании обратной связи по положению, сигнал о положении можно использовать чтобы остановить двигатель, после того, как ротор двигателя приблизится к нужному угловому положению.
АС серводвигатель — двигатель переменного тока. В ценообразовании двигатель переменного тока дешевле двигателя постоянного тока. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели и коллекторные.
В синхронных двигателях переменного тока ротор и магнитное поле вращается синхронно с одинаковой скоростью и в одном направлении с статором, а в асинхронных двигателях переменного тока ротор вращается несинхронно по отношению с магнитным полем. В асинхронном двигателе из-за отсутствия коллектора (щетки) регулировка оборотов происходит за счет изменения частоты и напряжения.
DC серводвигатель — двигатель постоянного тока.
Серводвигатели постоянного тока из за своих динамических качеств могут быть использованы приводом непрерывного действия. Серводвигатели постоянного тока могут постоянно работать в режимах старт, остановка и работать в обоих направлениях вращения. Обороты и развиваемый крутящий момент можно изменять путем изменения величины напряжения тока питания или импульсами.
Преимущества серводвигателей:
- При малых размерах двигателя можно получить высокую мощность
- Большой диапазон мощностей
- Отслеживается положение, за счет использования обратной связи
- Высокий крутящий момент по отношении к инерции
- Возможность быстрого разгона и торможения
- При высокой скорости, высокий крутящий момент
- Допустимый предел шума при высоких скоростях
- Полное отсутствия резонанса и вибрации
- Точность позиционирования
- Широкий диапазон регулирования скорости.
- Точность поддержания скорости и стабильность вращающего момента.
- Высокий статический момент Мо при нулевой скорости вращения.
- Высокая перегрузочная способность: Mmax до 3.5Mo, Imax до 4Io
- Малое время разгона и торможения, высокое ускорение (обычно > 5 м/с 2 ).
- Малый момент инерции двигателя, низкий вес, компактные размеры.
Пример работы двигателя:
На данном примере я перескажу вам принцип работы серводвигателя. После того, как вы сгенерировали управляющую программу, она создается в системе G-кодов, то есть ваша линия, окружность или любой созданный вами объект конвертируется в перемещение по координатам X,Y, Z на определённое расстояние. За расстояние отвечают импульсы, которые подаются через блок управления на двигатель. При перемещении любой из осей, например на 100 мм, драйвер (блок управления) подает определённое напряжение на двигатель, вал двигателя (ротор). Вал двигателя соединен с ходовым винтом (ШВП), вращение оборотов двигателя отслеживается энкодер. При вращении ходового винта по любой из осей, потому что при использовании серво, энкодеры (обратная связь) устанавливаются на тех осях, где вы хотите определить положение, на энкодер подаются импульсы, которые считываются системой управления ЧПУ. Системы ЧПУ программируются так, что ни понимают что, например, для перемещения на 100 мм необходимо получить определенное количество импульсов. Пока система ЧПУ не получит нужное количество импульсов на вход драйвера (блока управления) будет подаваться напряжение задания (рассогласование). Когда портал станка проедет заданные 100 мм, система ЧПУ получит нужное количество импульсов и напряжение на входе драйвера упадет до 0 и двигатель остановится. Прошу вас заметить, что преимущество обратной связи в том, что если по какое то либо причине произойдет смещение портала станка, энкодер отправит на систему управления нужное количество импульсов, для подачи нужного напряжения на согласования драйвера (блока управления), и двигатель поменяет угол. Для того что разногласие было равно 0, это помогает удерживать станок в заданной точке с высокой точностью. Не все типы двигателей способны, обеспечивать динамику разгона, нужный крутящий момент и т. п.
Сравнительная характеристика по основным параметрам
Срок эксплуатации и обслуживание
Шаговые двигатели – нет щеток, это увеличивает срок эксплуатации до многих лет, единственным слабым местом являются подшипники, могут работать в большом диапазоне высоких температур. Срок эксплуатации в разы дольше любого типа двигателя.
Из всех видов серво двигателей, самые дешевые это двигателя коллекторного типа (со щетками), они менее надежны, чем шаговые двигатели и требуют замены щеток примерно через 5000 часов непрерывной работы.
Другой тип бесколлекторных сервоприводов производятся по надежности как и шаговые двигателя, отсутствие щеток увеличивает срок эксплуатации, но не уменьшает стоимость ремонта. В некоторых случаях проще и дешевле купить новый двигатель, а не пытаться его отремонтировать.
Очень тяжело повредить и износить подшипник. Как и в любом двигателе возможно повреждение обмотки двигателя. Из низкой цены проще купить новый шаговый двигатель.
В некоторых случаях проще и дешевле купить новый двигатель, а не пытаться его отремонтировать.
При использование точных механизмов, может быть не ниже +/- 0.01 мм
сервоприводы имеют высокую динамическую точность до 1-2мкм и выше (1 мкм = 0.001 мм)
В лазерно гравировальных станках скорость 20 – 25 метров в минуту. Если мы говорим о фрезерных станках ЧПУ с тяжелыми порталами и балками. Максимальная скорость перемещения до 9 м/мин.
С использованием сервоприводов в станках с ЧПУ возможно достижение скоростей до 60 м/мин при использование высокосортной механике.
до 120 об/мин за секунду
до 1000 об/мин за 0,2 секунды
Потеря шагов при повышении скорости и нагрузки
При высоких скоростях и высоких нагрузках происходит потеря шагов. Эта не проблема возможна при воздействии внешних факторов: ударов, вибраций, резонансов и т.п.
У серво двигателей присутствует обратная связь, что полностью исключает потерю шагов.
Принудительная остановка (столкновение с препятствием)
Принудительная остановка шагового двигателя не вызывает у него никаких повреждений
В случае принудительной остановки серводвигателя, драйвер мотора должен правильно среагировать на данную остановку. В противном случае по обратной связи подается сигнал на доработку не пройденного расстояния, повышается ток на обмотках, двигатель может перегреться и сгореть!
По цене шаговый двигатель намного дешевле своего товарища серво двигателя.
Минимум в 1,5 раз дороже шагового двигателя.
Каждый тип двигателя предназначен для своей задачи. В некоторых случаях нужно использовать шаговых двигатель, а для некоторых задач необходимо использовать только серво двигатель. В фрезерных станках ЧПУ широко используются оба типа двигателей, просто у каждого из них есть свои задачи, и иногда не целесообразно переплачивать за серво, при небольших объемах производства.
Подведем черту сравнения серводвигателей и шаговых двигателей:
Если же вас не устраивают скоростные характеристики, Вам необходимо рассмотреть фрезерные деревообрабатывающие станки с ЧПУ «АртМастер» 2112, 2515, 3015(авт.) и высокоскоростной фрезерный деревообрабатывающий станок «АртМастер 3015 Racer».
Вы всегда должны для себя понимать, что сервомоторы позволяют вам с экономить время на холостых переходах, при этом вы не должны забывать правильно оптимизировать количество проходов. Скорость фрезеровки всегда зависит от мощности режущего инструмента (электрошпинделя) и типа фрезы. Мы не сможете получить хорошую скорость фрезеровки при низком качестве инструмента. Вы получите либо брак в изделии, либо Вам потребуется постоянная замена режущего инструмента. То есть при использовании высоких скоростей, при обработке материала вы не должны забывать о качестве и типе инструмента для фрезеровки. Дорогой инструмент не только быстрее режет, но и служит дольше. И прошу не забывать другое преимущество серво: высокая скорость и производительность в разы выше, чем у шагового при фрезеровке объёмных изображений (фото), резьбы (фото). При наличии смены инструмента, вакуумного стола вы можете оптимизировать ваше производство и минимизировать отходы.
Если вы хотите добиться увеличения объёмов выполненной работы на вашем производстве, решение только одно — сервомоторы, а для старта или изготовления фасадов, дверей, столешниц, и прямолинейного, криволинейного раскроя при объёмах производства от 500-1000 кв.м, вы можете остановить свой выбор на станках с шаговыми двигателями.
- Назад
- Вперёд
Лизинг от ПриватБанка

Наше оборудование можно приобрести в лизинг от ПриватБанка
Мы в Google Play!

Используйте наше приложение для смартфонов и планшетов на базе ОС Android для ознакомления с нашей продукцией!