Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
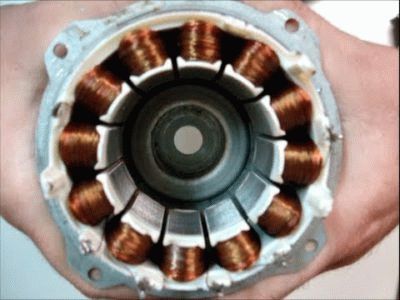
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.

- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
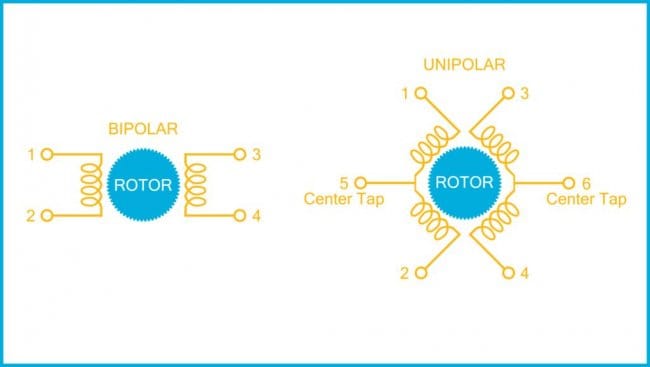
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.

На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
-
Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим — ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.

Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.

Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.

Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.

Если подавать уровни не «0» — «½» — «1» (как на картинке), а «0» — «¼» — «½» — «¾» — «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления — доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.

Пример работы шаговых двигателей с разными видами роторов:

Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
Шаговый двигатель
Шаговый двигатель представляет собой устройство, преобразующее электрическую энергию в механическую. По конструкции это бесколлекторный синхронный мотор с ротором, совершающим дискретные перемещения с фиксацией положения после каждого смещения. Величина шага строго определена, что позволяет вычислять абсолютную позицию ротора, подсчитав количество шагов.
Принципы действия биполярных и униполярных шаговых двигателей
Биполярный
Основные элементы шагового двигателя – ротор и статор. Первый представляет собой постоянный двухполюсный магнит. Он располагается на валу устройства. Статор – это замкнутый магнитопровод в виде кольца, он состоит из двух обмоток, половинки которых находятся на противоположных полюсах. На обмотке АВ – вертикально размещенные, на СD – горизонтально расположенные.
- При подаче напряжения на АВ появляется магнитное поле статора. Сверху полюс N, внизу S. Так как разноименные полюса притягиваются, ротор двигателя займет положение, при котором ось его магнитного поля совпадет с осью работающих АВ. Такое расположение ротора двигателя является очень устойчивым, если попытаться его сдвинуть, возникнет сила, которая будет его возвращать назад.
- Напряжение с обмотки АВ снимается и подается на обмотку CD, в результате чего возникает магнитное поле, в котором полюса расположены горизонтально – справа N, а слева S. Соответственно, постоянный магнит ротора расположится по горизонтальной оси, проделав минимальный путь – повернувшись на четверть оборота. Это будет шагом двигателя.
- Каждая последующая коммутация (со сменой полярности при подключении обмотки) заставит ротор поворачиваться на одну четвертую окружности. На полный оборот потребуется четыре шага. Частота вращения пропорциональна частоте переключения фазных обмоток. Если подключать фазы, меняя полярность в противоположной последовательности, ротор шагового двигателя будет вращаться в обратную сторону.
Униполярный
Выше был описан принцип работы биполярного шагового двигателя – у него для каждой фазы предусмотрено две обмотки. Чтобы менять магнитное поле, необходимо каждую обмотку:
- отключить от источника электротока,
- подключить в прямой полярности,
- подключить в обратной полярности.
Осуществить коммутацию позволяет мостовой драйвер, который представляет собой сложную микросхему. Такой вариант подходит, если ток коммутации не превышает 2 А. Решить вопрос с управлением биполярным двигателем значительно сложнее при потребности в больших коммутационных токах. Значительно проще менять магнитное поле в статоре шагового двигателя, если использовать устройство с униполярными обмотками. В этом случае один вывод у всех четырех обмоток подсоединен к плюсовому выводу, а А, В, С и D последовательно подсоединяются к минусовому сигналу. В результате при каждой коммутации создается магнитное поле, заставляющее ротор двигателя повернуться. Коммутация по такому принципу обеспечивается четырьмя ключами, которые замыкают обмотки на землю. Управление ключами обычно осуществляется с выводов микроконтроллера.
При выборе шагового двигателя следует учитывать, что биполярный, при тех же габаритах, что и униполярный, обеспечивает больший крутящий момент. Выигрыш достигает 40 %. Это связано с тем, что в шаговом униполярном двигателе задействуется одна обмотка, а в биполярном две. Преимуществом устройства с одной обмоткой является простое управление.
Виды шаговых двигателей
Существует несколько разновидностей. К наиболее востребованным относятся модели с переменным магнитным сопротивлением, с постоянным магнитом и гибридные.
Устройства с переменным магнитным сопротивлением
Такие шаговые двигатели не имеют постоянных магнитов в роторе. Для изготовления ротора зубчатой формы используется магнитомягкий материал. Его вращение обеспечивается за счет замыкания магнитного поля статора через зубцы, располагающиеся вблизи полюсов. Зубцы к полюсам притягиваются и ротор поворачивается. Шаговые двигатели с переменным магнитным сопротивлением имеют небольшой крутящий момент в сравнении с моделями других типов при тех же габаритах. Это ограничивает сферу их применения.
Устройства с постоянными магнитами
На примере такого устройства выше разъяснялся принцип работы шаговых двигателей. В реальности роторы таких двигателей имеют несколько постоянных магнитов. От их количества зависит число шагов, за которое ротор выполняет полный оборот. Максимальное значение – 48, угол шага при этом составляет 7,5 градусов.
Гибридные устройства
В конструкции шаговых гибридных двигателей присутствует и зубчатый ротор, и постоянные магниты. Функционирует устройство по тому же принципу, что и двигатель с постоянными магнитами, но гибридный вариант отличается большим числом полюсов. За счет такого количества полюсов у гибридных шаговых двигателей больший момент, выше скорость и меньше величина шага. Максимальное число на один оборот может доходить до 400, при этом угол шага составляет 0,9 градусов. Гибридные устройства сложнее в изготовлении и дороже шаговых устройств других типов, но благодаря высокой функциональности пользуются спросом.
Особенности управления
Для управления двигателем с дискретным движением ротора используются следующие режимы: полношаговый, полушаговый и микрошаговый.
Полношаговый режим
При таком способе двигателем производится попеременная коммутация фаз. При этом к источнику напряжения фазы подключаются попеременно без перекрытия. Точки равновесия ротора при таком управлении совпадают с полюсами статора. К недостаткам полношагового режима относят то, что в каждый момент времени у биполярного двигателя используется половина обмоток, а у униполярного лишь четверть. Если подключить две фазы на полный шаг, то ротор будет зафиксирован между полюсами статора благодаря подаче питания на все обмотки. При этом увеличивается крутящий момент шагового двигателя, а положение ротора в состоянии равновесия смещается на полшага. Угол шага при этом остается неизменным.
Полушаговый режим
Если каждый второй шаг включать одну фазу, а между этим включать сразу две, можно увеличить количество перемещений на один оборот в два раза. Такая коммутация, соответственно, в два раза уменьшает угол шага. При этом достичь полного момента в полушаговом режиме невозможно. Режим активно используется, так как позволяет простым способом вдвое увеличить число шагов двигателя. Важно учитывать, что при снятии напряжения со всех фаз в полношаговом и полушаговом режиме ротор остается в свободном состоянии и может произойти его смещение при механических воздействиях. Для фиксации ротора требуется в обмотках двигателя формировать ток удержания. Обычно его значение намного меньше номинального. Благодаря способности шагового двигателя фиксировать положение ротора при остановке отсутствует необходимость использовать тормозную систему, фиксаторы и иные приспособления.
Микрошаговый режим
Чтобы максимально увеличить число шагов двигателя, используется микрошаговый режим. Для этого требуется включить две фазы и распределить ток обмоток неравномерно. При смещении магнитного поля статора относительно полюсов смещается и сам ротор. У диспропорции токов между рабочими фазами двигателя обычно наблюдается дискретность, которая определяет величину микрошага. Количество микрошагов на один оборот ротора шагового двигателя может составлять более 1 000. Устройство, работающее в таком режиме, можно максимально точно позиционировать. Однако данный способ управления является достаточно сложным.
Основные достоинства
К достоинствам шаговых двигателей относят:
- точное позиционирование, которое не требует обратной связи. Угол поворота определяется числом электрических импульсов;
- полный крутящий момент, который двигатель обеспечивает при снижении скорости вращении и до полной остановки;
- фиксацию положения шагового двигателя при помощи тока удержания;
- высокую точность регулировки скорости вращения без необходимости использования обратной связи;
- быстрый старт и остановку двигателя, реверс;
- высокую надежность. Устройства долговечны благодаря отсутствию коллекторных щеток.
Основные недостатки
К недостаткам шаговых двигателей можно отнести:
- относительно невысокие скорости вращения;
- сложную систему управления;
- риск эффекта резонанса;
- риск потери позиционирования ротора шагового двигателя под воздействием механических перегрузок;
- низкую удельную мощность.
Характеристики
Двигатель шагового типа является сложным механическим и электротехническим устройством. Список основных характеристик, которые следует учитывать при выборе устройства, включает:
- сопротивление обмотки фазы. Показатель сопротивления обмотки при работе на постоянном токе;
- число полных шагов за один оборот ротора. Это основной параметр шагового двигателя, который определяет точность позиционирования, плавность движения, разрешающую способность;
- угол полного шага. Это величина угла, на который поворачивается ротор за одно перемещение. Для расчета можно разделить 360° на количество шагов;
- номинальный ток. Наибольшее значение тока, при котором двигатель может работать неограниченно долгое время;
- номинальное напряжение. Максимально допустимое постоянное напряжение на обмотке при статическом режиме шагового двигателя;
- сопротивление изоляции. Величина сопротивления между корпусом и обмотками;
- момент инерции ротора. Чем меньше инерционность ротора, тем он быстрее разгоняется;
- крутящий момент. Для шагового двигателя это ключевой механический параметр. Указывается максимальное значение для конкретной модели двигателя;
- пробивное напряжение. Показатель минимального напряжения, при котором возникает пробой изоляции между корпусом и обмотками;
- индуктивность фазы. Данный параметр принимают во внимание, если от двигателя требуется высокая скорость вращения. От него зависит скорость увеличения тока в обмотке. Если фазы следует переключать с высокой частотой, необходимо увеличивать напряжение для быстрого нарастания тока;
- удерживающий момент. Это показатель крутящего момента при остановленном шаговом двигателе и при двух фазах, запитанных номинальным током.
Сфера применения
Шаговые двигатели рассчитаны на использование в составе устройств с дискретным управлением, где необходимо точно позиционировать исполнительные механизмы. Также они применяются в промышленном оборудовании с программным управлением, где требуется обеспечить непрерывное движение по заданной траектории и импульсное влияние исполнительными механизмами. Ротор шагового двигателя способен поворачиваться на заданный угол и на определенное количество оборотов вокруг своей оси. Благодаря этому шаговые устройства позволяют позиционировать считывающие головки проигрывателей оптических дисков, дисковых накопителей, печатающих головок сканеров, принтеров и иных устройств. Такие двигатели широко используются не только на производстве и в составе бытовой техники. Эти устройства востребованы радиотехниками, робототехниками, мастерами-любителями, изготавливающими самодельные станки с ЧПУ, движущиеся устройства и т. д. Для управления применяются специально разработанные контроллеры либо сложные электронные схемы. Управлять импульсными сигналами, заставляющими двигатель работать в заданном режиме, также можно через порт компьютера.
Шаговые двигатели

 Шаговым двигателем называют электромеханическое устройство, преобразующее электрические сигналы в дискретные угловые перемещения вала. Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения.
Шаговым двигателем называют электромеханическое устройство, преобразующее электрические сигналы в дискретные угловые перемещения вала. Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения.
Шаговые двигатели являются приводными исполнительными механизмами, обеспечивающими фиксированные угловые перемещения (шаги). Каждое изменение угла поворота ротора — это реакция шагового двигателя на входной импульс.
Дискретный электропривод с шаговым двигателем естественным образом сочетается с цифровыми управляющими устройствами, что позволяет успешно использовать его в станках с числовым программным управлением, в промышленных роботах и манипуляторах, в часовых механизмах.
Дискретный электропривод может быть реализован также с помощью серийных асинхронных электродвигателей, которые за счет специального управления могут работать в шаговом режиме.
 Шаговые двигатели применяются в электроприводах мощностью от долей ватта до нескольких киловатт. Расширение шкалы мощности дискретного электропривода может быть достигнуто при использовании серийных асинхронных электродвигателей, которые за счет соответствующего управления могут работать в шаговом режиме.
Шаговые двигатели применяются в электроприводах мощностью от долей ватта до нескольких киловатт. Расширение шкалы мощности дискретного электропривода может быть достигнуто при использовании серийных асинхронных электродвигателей, которые за счет соответствующего управления могут работать в шаговом режиме.
Принцип действия шаговых двигателей всех типов состоит в следующем. С помощью электронного коммутатора вырабатываются импульсы напряжения, которые подаются на обмотки управления, расположенные на статоре шагового двигателя.
В зависимости от последовательности возбуждения обмоток управления происходит то или иное дискретное изменение магнитного поля в рабочем зазоре двигателя. При угловом перемещении оси магнитного поля обмоток управления шагового двигателя его ротор дискретно поворачивается вслед за магнитным полем. Закон поворота ротора определяется последовательностью, скважностью и частотой управляющих импульсов, а также типом и конструктивными параметрами шагового двигателя.
Принцип действия шагового двигателя (получение дискретного перемещения ротора) рассмотрим на примере простейшей схемы двухфазного шагового двигателя (рис. 1).
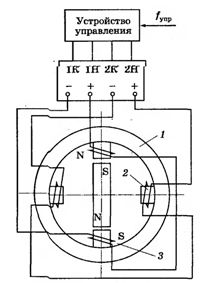
Рис. 1. Упрощенная схема шагового двигателя с активным ротором
Шаговый двигатель имеет на статоре две пары явно выраженных полюсов, на которых Находятся обмотки возбуждения (управления): обмотка 3 с выводами 1Н — 1К и обмотка 2 с выводами 2Н — 2К. Каждая обмотка состоит из двух частей, находящихся на противоположных полюсах статора 1 ШД.
Ротор в рассматриваемой схеме представляет собой двухполюсный постоянный магнит. Обмотки питаются импульсами от устройства управления, которое преобразует одноканальную последовательность входных импульсов управления f упр, в многоканальную (по числу фаз шагового двигателя).
 Рассмотрим работу шагового двигателя, предположив, что в начальный момент напряжение подано на обмотку 3. Ток в этой обмотке вызовет намагничивание вертикально расположенных полюсов N и 8. В результате взаимодействия магнитного поля с постоянным магнитом ротора последний займет равновесное положение, в котором оси магнитных полей статора и ротора совпадают.
Рассмотрим работу шагового двигателя, предположив, что в начальный момент напряжение подано на обмотку 3. Ток в этой обмотке вызовет намагничивание вертикально расположенных полюсов N и 8. В результате взаимодействия магнитного поля с постоянным магнитом ротора последний займет равновесное положение, в котором оси магнитных полей статора и ротора совпадают.
Положение будет устойчивым, поскольку на ротор действует синхронизирующий момент, стремящийся возвратить ротор в положение равновесия: М = М m ах х sin α ,
где М m ах — максимальный момент, α — угол между осями магнитных полей статора и ротора.
При переключении блоком управления напряжения с обмотки 3 на обмотку 2 образуется магнитное поле с горизонтальными полюсами, т.е. магнитное поле статора совершает дискретный поворот на четверть окружности статора. При этом между осями статора и ротора появится угол рассогласования α = 90° и на ротор будет действовать максимальный вращающий момент Мшах. Ротор повернется на угол α = 90° и займет новое устойчивое положение. Таким образом, вслед за шаговым перемещением поля статора совершает шаговое перемещение ротор двигателя.
 Основной режим работы шагового двигателя — динамический. Шаговые двигатели в отличие от синхронных рассчитаны на вхождение в синхронизм из состояния покоя и принудительное электрическое торможение. Благодаря этому в шаговом электроприводе обеспечивается пуск, торможение, реверс и переход с одной частоты управляющих импульсов на другую.
Основной режим работы шагового двигателя — динамический. Шаговые двигатели в отличие от синхронных рассчитаны на вхождение в синхронизм из состояния покоя и принудительное электрическое торможение. Благодаря этому в шаговом электроприводе обеспечивается пуск, торможение, реверс и переход с одной частоты управляющих импульсов на другую.
Пуск шагового двигателя осуществляется скачкообразным или постепенным увеличением частоты входного сигнала от нуля до рабочей, торможение — снижением ее до нуля, а реверс — изменением последовательности коммутации обмоток шагового двигателя.
Шаговые двигатели характеризуются следующими параметрами: число фаз (обмоток управления) и схема их соединения, тип шагового двигателя (с активным или пассивным ротором), одиночный шаг ротора (угол поворота ротора при единичном импульсе), номинальное напряжение питания, максимальный статический хронизирующий момент, номинальный вращающий момент, момент инерции ротора, частота приемистости.
Шаговые двигатели бывают однофазными, двухфазными и многофазными с активным или пассивным ротором. Управление шаговым двигателем обеспечивается электронным блоком управления. Пример схемы управления шаговым двигателем приведен на рисунке 2.
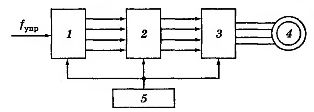
Рис. 2. Функциональная схема разомкнутого электропривода с шаговым двигателем
Сигнал управления f упр в виде импульсов напряжения поступает на вход блока 1, преобразующего последовательность импульсов, например в четырехфазную систему однополярных импульсов (в соответствии с числом фаз шагового двигателя).
Блок 2 формирует эти импульсы по длительности и амплитуде, необходимым для нормальной работы коммутатора 3, к выходам которого подключены обмотки шагового двигателя 4. Коммутатор и остальные блоки питаются от источника постоянного тока 5.
При повышенных требованиях к качеству дискретного привода применяют замкнутую схему шагового электропривода (рис. 3), которая кроме шагового двигателя включает преобразователь П, коммутатор К и датчик шага ДШ. В таком дискретном приводе информация о действительном положении вала рабочего механизма РМ и скорости шагового двигателя поступает на вход автоматического регулятора, который обеспечивает заданный характер движения привода.
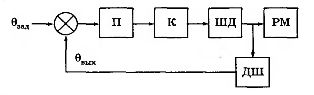
Рис. 3. Функциональная схема замкнутого дискретного привода
В современных системах дискретного привода применяются микропроцессорные средства управления. Область применения приводов с шаговыми двигателями постоянно расширяется. Их использование перспективно в сварочных автоматах, приборах времени, лентопротяжных и регистрирующих механизмах, системах управления топливоподачей двигателей внутреннего сгорания.
Преимущества шаговых двигателей:
высокая точность, даже в разомкнутой структуре управления, т. е. без датчика угла поворота;
естественная интеграция с приложениями цифрового управления;
отсутствие механических коммутаторов, которые часто создают проблемы в двигателях других типов.
Недостатки шаговых двигателей:
малый вращающий момент но сравнению с двигателями приводов непрерывного типа;
высокий уровень вибрации из-за скачкообразного движения;
большие ошибки и колебания при потере импульсов в системах с разомкнутым контуром управления.
Преимущества шаговых двигателей намного превосходят их недостатки, поэтому они часто применяются в тех случаях, когда достаточно небольшой мощности приводных устройств.
В статье использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Шаговый двигатель
Шаговый двигатель – электрический синхронный мотор, совершающий оборот некоторым количеством равноценных эквивалентных перемещений. От длины элементарного сегмента зависит точность, с которой ротор позиционируется нужным образом. В отдельности минимальное перемещение называется шагом.
Принцип действия шаговых двигателей, разновидности
Шаговый двигатель в комплекте с драйвером выполняет преобразование числа входящих импульсов в заданное угловое перемещение вала. Устройство сопрягается с цифровой техникой, управляющий сигнал часто аналоговый. Входы обмоток посещает синусоида нужной фазы. Драйвер, получающий на контакты цифровой сигнал, декодирует волну, формирует нужные сигналы управления двигателем. Одна, две, три, четыре фазы. Определяется конструкцией, нуждами техники.
Конструкция шагового двигателя
Особенностью шагового двигателя назовем форму стального ротора. Снабжен полюсами, подчеркнутыми путем вынесения на кончик острого либо тупого зубца. Мертвый металл, притягиваемый катушками статора. Характеризуется некоторой намагниченностью остаточного рода, вызванной действием поля. Точное позиционирование полюсов статора обеспечивает шаговому двигателю уникальное свойство: точное позиционирование по углу поворота вала. Из правила встречаются исключения, рассмотренные ниже по тексту.
Шаговые двигатели используются промышленностью, цифровой техникой – где требуется обеспечить точное позиционирование вала. Некоторые источники датируют изобретение серединой XIX века, первые сведения просочились в специализированные журналы в 20-х годах XX века. Речь о трехфазном реактивном шаговом двигателе. Исходное применение традиционно стало военным: на кораблях королевского флота Великобритании узлы направляли в нужную сторону торпеды. Позже технология перекочевала, посетив армию США.
Первый открытый патент получен на прибор с ротором, статором на 32 зуба шотландским инженером Уолкером в 1919 году. Прибор рассчитан работать с трехфазным напряжением. Сегодня шаговые двигатели встречаются в жестких дисках персональных компьютеров, автоматизированных линиях сборки. Ключевыми достоинствами считают низкую стоимость, простоту позиционирования. Альтернатив не придумано. Устройства применяются приблизительно с 70-х годов XX века, формируют четыре основные группы:
- Шаговые двигатели на постоянных магнитах.
- Гибридные синхронные двигатели.
- Вентильные реактивные двигатели.
- Шаговые двигатели Лавета.
Полюсы различной намотки, к примеру, унифилярной, бифилярной (см. Катушка индуктивности). В первом случае ротор совершает обороты однонаправленно, если не предусмотреть дополнительную коммутацию фаз. Бифилярный двигатель отрабатывает реверс простой подачей напряжения на другие пары контактов. На каждом полюсе нить проволоки намотана, образуя две катушки. Конструкция такова, что знаки полей противоположные. Обеспечивает простую организацию реверса. Схожие схемы видим на примере двигателя привода барабана стиральной машины.
Мировой практикой принята стандартизированная маркировка указанных разновидностей устройств:
- Унифилярные:
- Красный, желтый – первая обмотка.
- Черный, оранжевый – вторая обмотка.
- Бифилярные:
- Обмотка с центральным общим выводом. Красный, черный, красный с белым – первая обмотка. Зеленый, белый, зеленый с белым – вторая обмотка.
- Двойная обмотка полюса. Красный, красный с белым – первая пара первой обмотки. Желтый, желтый с белым – вторая пара первой обмотки. Черный, черный с белым —первая пара второй обмотки. Оранжевый, оранжевый с белым – вторая пара второй обмотки.
Каждая обмотка способна образовывать несколько полюсов. Для включения реверса бифилярных шаговых двигателей коммутируется другая пара контактов. И если для формирования обратного вращения унифилярных разновидностей нужен формирующий контроллер, здесь допустимо использовать рядовой контактор.
Режимы работы шаговых двигателей
Изделия функционируют в нескольких режимах:
- Полный шаг реализуется поочередной подачей управляющих напряжений по фазам. Стандартное число – 200 перемещений на 1 оборот.
- В режиме половинного шага после активации одной фазы, остается состояние неизменным часть времени включения следующей. Получается, на зуб действуют одновременно два полюса. Вал замирает, фиксируя промежуточное положение. Потом первая фаза пропадает, ротор делает полшага вперед. Несмотря на меньший развиваемый крутящий момент, режим находит большее применение промышленностью, благодаря сокращению уровня вибраций.
Электрический синхронный мотор
Шаговые двигатели на постоянном магните
Род двигателей возможно встретить в помпе стиральной машины. К примеру, блок, удаляющий воду бака после стирки, между отдельными этапами цикла. Скорость вращения вала невелика, ротор в составе содержит постоянный магнит, шаг большой. Допустим, 45 градусов. На обмотки статора поочередно подается напряжение, создавая вращающееся магнитное поле. Постоянный магнит вала следует изменениям вектора напряженности.
Достоинствами шаговых двигателей назовем простоту, низкую стоимость. Постоянные магниты часто применяются принтерами. Отличие от других шаговых двигателей: ротор лишен зубцов, полюсов мало. Бывает два, катушек статора – 4, каждым перемещением вал совершает поворот 90 градусов. Требуется 4 фазы, сдвинутые друг относительно друга на 90 градусов. Драйвер просто реализовать при помощи конденсаторов.
Благодаря низкой скорости оборотов двигатель развивает высокий крутящий момент (загружая бумагу из лотка принтера).
Двигатель с постоянным магнитом
Гибридные синхронные двигатели
Гибридные синхронные двигатели используются промышленностью по причине развития высокого крутящего момента, хорошо держат статическую нагрузку. Вал по-прежнему представлен постоянным магнитом, снабжается зубцами, на статоре множество полюсов. Тип двигателей обеспечивает высокие скорости вращения. Каждый шаг в стандартном исполнении равен 1,8 угловых градусов (200 шагов/оборот). Выпускают специализированные исполнения:
- 0,9 градуса (400 шагов/оборот).
- 3,6 градуса (100 шагов/оборот).
Вентильные шаговые двигатели
Главным отличием вентильных двигателей считают отсутствие тяжелых постоянных магнитов. Благодаря чему жесткой фиксации положения не происходит при наличии высокой точности. Двигатели идеальны для просмотра слайдов кинопленки. Относительно плавное, точное движение идеально подходит случаю.
Ротор облегченный, стальной, имеет ярко выраженные, сравнительно немногочисленные зубцы. Шаг средний, например, для трех фаз, 12 полюсов выйдет 15 градусов. Расстояние меж полюсами составляет 30 градусов. Промежуточные положения вал занимает в случаях, когда активируются одновременно две соседние фазы. Чередование соответствует обычной промышленной сети (к примеру, 400 вольт).
Главной особенностью вентильных двигателей является сравнительно малое количество тупых зубцов. Высокой точности позиционирования ожидать не приходится. Для реализации продвинутых алгоритмов применяются сложные драйверы.
Шаговые двигатели Лавета
Шаговые двигатели Лавета временами применяются электрическими часами. Сконструированы работать с сигналом одной фазы. Благодаря возможности миниатюризации двигатели Лавета послужат исполнительной частью наручных часов. Название устройства получили именем изобретателя – инженера Мариуса Лавета.

Инженер Мариус Лавет позавидует
В 1936 году выпускник Высшей школы электрики сконструировал двигатель, принесший всемирную известность. Статор выглядит, как у электрического мотора с расщепленными полюсами. Одна катушка. Полюсы образованы единичными витками сравнительно толстой медной проволоки, расположенными на магнитопроводе, создавая нужную фазу ЭДС. Индуцированные токи обеспечивают нужный крутящий момент. Задержка распространения магнитного поля по сердечнику используется сдвигать фазу на 90 градусов, имитируя двухфазное напряжение. Ротор представлен постоянным магнитом.
Конструкции охотно используются бытовой техникой (блендерами, миксерами). Отличие двигателей Лавета в том, что благодаря зубцам вал фиксируется с некоторым шагом. Становится возможным характерное движение секундной стрелки. Как большинство шаговых двигателей, разновидность не предназначена работать на реверс.
Параметры шаговых двигателей
Отдельные параметры шаговых двигателей критичны при выборе соответствующего контроллера, формирующего управляющие напряжения:
- Индуктивность. Высокое значение параметра обычно у низкоскоростных двигателей с явным крутящим моментом. При повышении количества оборотов вала параметры оборудования непременно ухудшатся. При низкой индуктивности ток вызывает быстрый отклик, требуется в приводах для чтения оптических дисков.
- Потребляемый ток влияет на жесткость переключения меж соседними шагами. Более плавный режим требует снижения параметра. Большой потребляемый ток повышает крутящий момент. Таким образом, правильный выбор параметров загружает плечи проектировщика.
- Предельный уровень рабочих температур шаговых двигатель невелик. Верхняя граница находится в области 90 градусов Цельсия. Перегрев возможен на высоких крутящих моментах при значительном потреблении тока. Для разгрузки иногда применяется режим удержания, когда вал стопорится некоторое время.
Разновидности драйверов шаговых двигателей
В глобальном смысле выделяют три группы драйверов управления шаговыми двигателями:
- Униполярные формируют импульсы тока одного направления. Простой, неприхотливый метод, использование снижает крутящий момент на 40%. Специалисты объясняют феномен невозможностью одновременного питания всех обмоток, способных участвовать в движении. Методика подходит низким рабочим скоростям.
- Драйверы с гасящими резисторами сегодня считаются устаревшими. Позволяют выжать из двигателя максимум скорости. Большое количество энергии выделяется теплом на гасящих резисторах.
- Биполярные драйверы популярны сегодня. Игнорируя сложность конструкции, достигается высокая эффективность. Каждый драйвер содержит формирующий блок, составленный четырьмя транзисторами. Питание подается, минуя диоды, с резистора снимается сигнал обратной связи. Напряжение достигает определенного уровня, открываются нужные ключи для снижения. Форма сигнала принимает пилообразную форму, двигатель с высоким постоянством поддерживает заданную мощность.
Введение в устройство шаговых двигателей

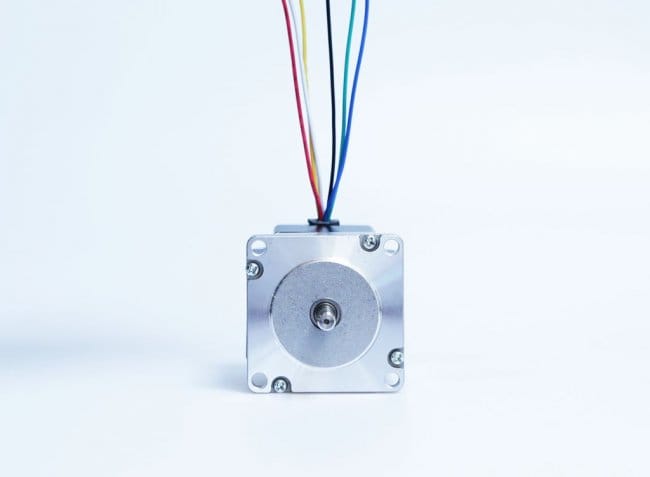
Если вы когда-либо имели удовольствие демонтировать старый принтер, чтобы сохранить электронные компоненты, то можете столкнуться с множеством цилиндрических загадочных моторов с 4 или более проводами, выступающими из сторон. Возможно, вы слышали характерное жужжание настольного 3D-принтера или глючную электромеханическую симфонию дисков в CD приводе? Если так, то вы столкнулись с шаговым двигателем!
Шаговые двигатели заставляют электромеханический мир вращаться ( с более высоким крутящим моментом!), но в отличие от обычного двигателя постоянного тока, управление шаговым двигателем требует чуть больше, чем ток через два провода. В этой статье будет рассказано о теории проектирования и эксплуатации шагового двигателя. Как только рассмотрим основы, автор данного руководства покажет, как построить простые схемы для управления шаговыми двигателями, а затем как использовать специальные микросхемы драйверов.
Шаг 1: Что делает мотор шаговым двигателем?
Кому может понадобиться более двух проводов и Н-мост? Зачем? Ну, в отличие от обычных щеточных двигателей постоянного тока, построенных для максимального числа оборотов (или кВ для RC), шаговые двигатели представляют собой бесщеточные двигатели, рассчитанные на высокий крутящий момент (впоследствии меньшую скорость) и более точное вращательное движение. В то время как типичный двигатель постоянного тока отлично подходит для вращения гребного винта на высокой скорости для достижения максимальной тяги, шаговый двигатель лучше подходит для прокатки листа бумаги синхронно со струйным механизмом внутри принтера или для осторожного вращения вала линейного рельса в мельнице с ЧПУ.
Внутри шаговые двигатели являются более сложными, чем простой двигатель постоянного тока, с несколькими катушками вокруг сердечника с постоянными магнитами, но с этой дополнительной сложностью обеспечивается больший контроль. Благодаря тщательному расположению катушек, встроенных в статор, ротор шагового двигателя может вращаться с заданным шагом, изменяя полярность между катушками и переключая их полярность в соответствии с установленной схемой зажигания. Шаговые двигатели не все сделаны одинаковыми, и для их внутреннего исполнения требуются уникальные (но базовые) схемы. Обсудим наиболее распространенные типы шаговых двигателей на следующем шаге.
Шаг 2: Типы шаговых двигателей

Есть несколько различных конструкций шаговых двигателей. К ним относятся однополярное, биполярное, универсальное и переменное сопротивление. Мы будем обсуждать конструкцию и работу биполярных и однополярных двигателей, так как это наиболее распространенный тип двигателя.
У однополярных двигателей обычно есть пять, шесть или восемь проводных выводов, идущих от основания, и одна катушка на фазу. В случае пятипроводного двигателя пятый провод представляет собой соединенные центральные отводы пар катушек. В шестипроводном двигателе каждая пара катушек имеет собственный центральный отвод. В двигателе с восемью проводами каждая пара катушек полностью отделена от других, что позволяет подключать ее в различных конфигурациях. Эти дополнительные провода позволяют приводить в действие однополярные двигатели непосредственно от внешнего контроллера с простыми транзисторами, чтобы управлять каждой катушкой отдельно. Схема зажигания, в которой приводится в действие каждая катушка, определяет направление вращения вала двигателя. К сожалению, учитывая, что за один раз подается только одна катушка, удерживающий момент однополярного двигателя всегда будет меньше, чем у биполярного двигателя того же размера. Обойдя центральные отводы однополярного двигателя, он теперь может работать как биполярный двигатель, но для этого потребуется более сложная схема управления. На четвертом шаге этой статьи мы приведем в действие однополярный двигатель, который должен прояснить некоторые из представленных выше концепций.
Биполярные двигатели, как правило, имеют четыре провода и являются более прочными, чем однополярный двигатель сравнительного размера, но поскольку у нас есть только одна катушка на фазу, нам нужно повернуть ток через катушки, чтобы перейти на один шаг. Наша потребность изменить ток означает, что мы больше не сможем управлять катушками напрямую с помощью одного транзистора, вместо этого — полная цепь h-моста. Построение правильного h-моста утомительно (не говоря уже о двух!), Поэтому мы будем использовать выделенный драйвер биполярного двигателя (см. Шаг 5).
Шаг 3: Понимание спецификаций шагового двигателя
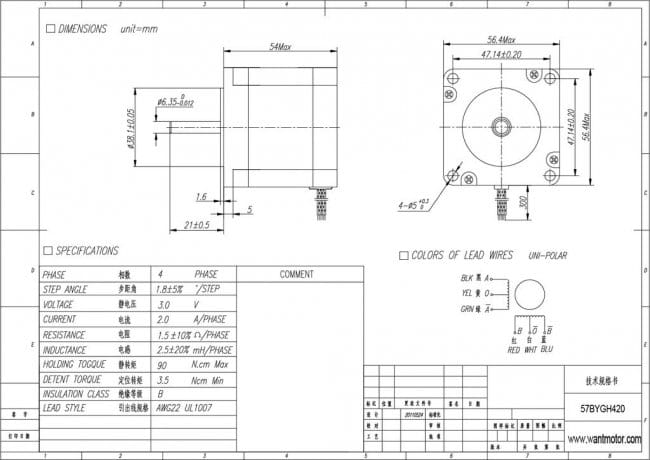
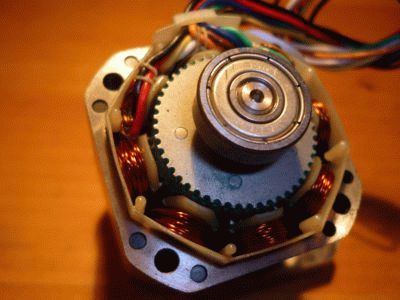
Давайте поговорим о том, как определить технические характеристики двигателя. Если вы встречали двигатель квадратного сечения с определенной сборкой из трех частей (см. Рисунок три), скорее всего, это двигатель NEMA. Национальная ассоциация производителей электрооборудования имеет определенный стандарт для спецификаций двигателя, использующий простой буквенный код для определения диаметра лицевой панели двигателя, типа крепления, длины, фазного тока, рабочей температуры, фазного напряжения, шагов на оборот и проводки.
Чтение паспорта двигателя
Для следующего шага будет использован этот однополярный мотор. Выше приложена таблица данных. И хотя она краткая, она предоставляет нам все, что нам нужно для правильной работы. Давайте разберем, что в списке:
Фаза: это четырехфазный однополярный мотор. Внутренне двигатель может иметь любое количество реальных катушек, но в этом случае они сгруппированы в четыре фазы, которые могут управляться независимо.
Шаг угла: При приблизительном разрешении 1,8 градусов на шаг мы получим 200 шагов на оборот. Хотя это является механическим разрешением, с помощью микроперехода мы можем увеличить это разрешение без каких-либо изменений двигателя (подробнее об этом в шаге 5).
Напряжение: номинальное напряжение этого двигателя составляет 3 вольта. Это функция тока и номинальных сопротивлений двигателя (закон Ома V = IR, следовательно, 3V = 2A * 1,5Ω)
Ток: сколько тока нужно этому двигателю? Два ампера на фазу! Эта цифра будет важна при выборе наших силовых транзисторов для базовой схемы управления.
Сопротивление: 1,5 Ом на фазу ограничит то, какой ток мы можем подать на каждую фазу.
Индуктивность: 2,5 мГн. Индуктивная природа катушек двигателя ограничивает скорость зарядки катушек.
Удерживающий момент: это то, сколько фактической силы мы можем создать, когда на шаговый двигатель подано напряжение.
Момент удержания: это то, какой момент удержания мы можем ожидать от двигателя, когда он не находится под напряжением.
Класс изоляции: класс B является частью стандарта NEMA и дает нам рейтинг в 130 градусов Цельсия. Шаговые двигатели не очень эффективны, и постоянное потребление максимального тока означает, что они будут сильно нагреваться при нормальной работе.
Показатели обмотки: диаметр провода 0,644 мм., количество витков в диаметре 15,5, сечение 0,326 мм2
Определение пар катушек
Хотя сопротивление обмоток катушки может варьироваться от двигателя к двигателю, если у вас есть мультиметр, вы можете измерить сопротивление на любых двух проводах, если сопротивление Шаг 4: Непосредственное управление шаговыми двигателями
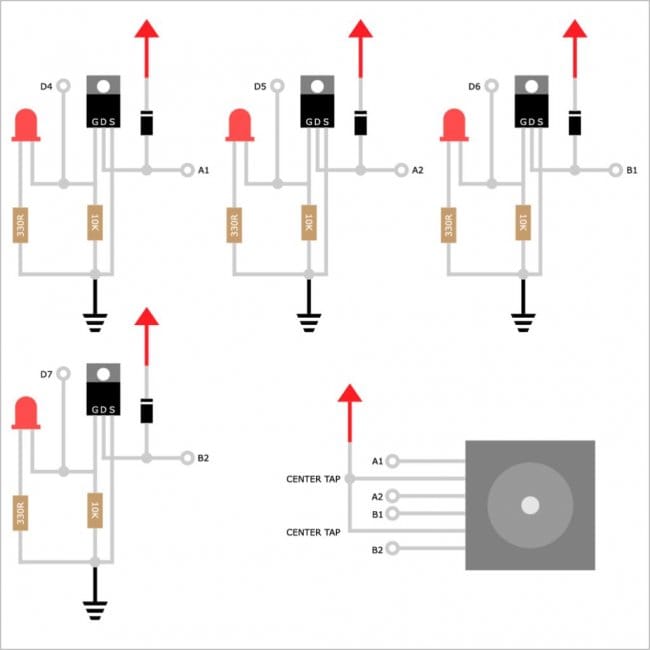
Благодаря расположению проводов в однополярном двигателе мы можем последовательно включать катушки, используя только простые силовые полевые МОП-транзисторы. На рисунке выше показана простая схема с МОП-транзистором. Такое расположение позволяет просто контролировать уровень логики с помощью внешнего микроконтроллера. В этом случае легче всего использовать плату Intel Edison с коммутационной платой в стиле Arduino, чтобы получить легкий доступ к GPIO (однако подойдет любой микро с четырьмя GPIO). Для этой схемы используется транзистор IRF510 N-канальный мощный MOSFET. IRF510, способный потреблять до 5,6 ампер, будет иметь достаточно свободной мощности, чтобы удовлетворить потребности двигателя в 2 амперах. Светодиоды не нужны, но они дадут вам хорошее визуальное подтверждение последовательности работы. Важно отметить, что IRF510 должен иметь логический уровень не менее 5 В, чтобы он мог потреблять достаточный ток для двигателя. Мощность двигателя в этой цепи будет 3 В.
Полное управление однополярным двигателем с помощью этой настройки очень простое. Для того, чтобы вращать двигатель, нам нужно включить фазы в заданном режиме, чтобы он вращался правильно. Чтобы вращать двигатель по часовой стрелке, мы будем управлять фазами следующим образом: A1, B1, A2, B2. Чтобы вращать против часовой стрелки, мы просто изменим направление последовательности на B2, A2, B1, A1. Это хорошо для базового контроля, но что, если вы хотите большей точности и меньше работы? Давайте поговорим об использовании выделенного драйвера, чтобы сделать всё намного проще!
Шаг 5: Платы драйверов шаговых двигателей
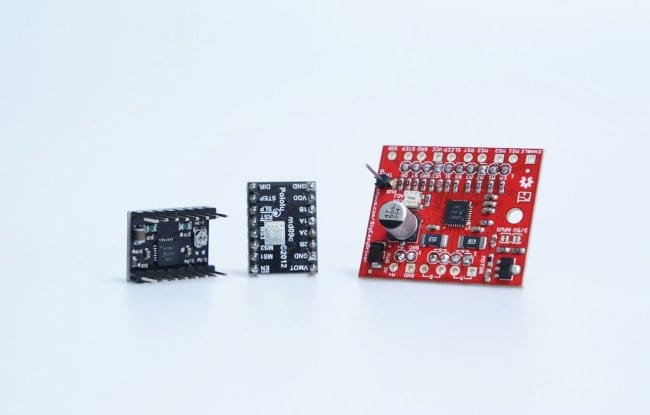
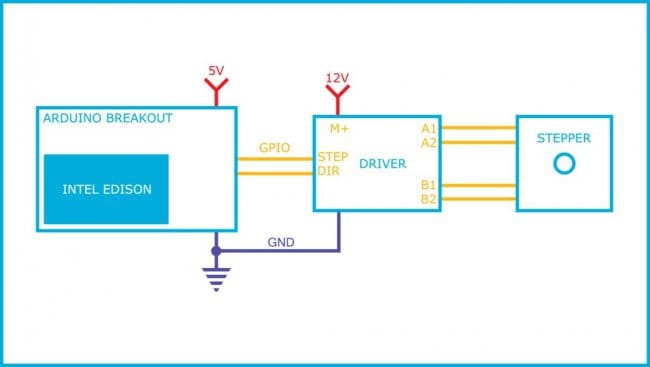
Если вы хотите приступить к управлению биполярными двигателями (или однополярными двигателями в биполярной конфигурации), вам нужно взять специальную плату управления драйвером. На фото выше изображен драйвер Big Easy Driver и плата-носитель драйвера шагового двигателя A4988. Обе эти платы являются печатными платами для микрошагового двухполюсного драйвера шагового двигателя Allegro A4988, который на сегодняшний день является одним из наиболее распространенных чипов для привода небольших шаговых двигателей. Помимо наличия необходимых двойных h-мостов для управления биполярным двигателем, эти платы дают много возможностей для крошечной недорогой упаковки.
Эти универсальные платы имеют удивительно низкое соединение. Вы можете начать управлять двигателем, используя только три соединения (только два GPIO) с вашим главным контроллером: общее заземление, шаг и направление. Ступенчатый шаг и его направление остаются плавающими, так что нужно привязать их к опорному напряжению с нагрузочным резистором. Импульс, посылаемый на вывод STEP, будет перемещать двигатель на один шаг с разрешением в соответствии с эталонными выводами микрошага. Логический уровень на выводе DIR определяет, будет ли двигатель вращаться по часовой стрелке или против часовой стрелки.
В зависимости от того, как установлены выводы M1, M2 и M3, вы можете добиться увеличения разрешения двигателя с помощью микрошагования. Микрошаг включает в себя посылку разнообразных импульсов, чтобы тянуть двигатель между электромагнитным разрешением физических магнитов в роторе, обеспечивая очень точное управление. A4988 может перейти от полного шага до разрешения шестнадцатого шага. С нашим двигателем 1,8 градуса это обеспечит до 3200 шагов за оборот. Поговорим о мелких деталях!
Подключение двигателей может быть легким, но как насчет управления ими? Посмотрите эти готовые библиотеки кода для управления шаговыми двигателями:
Stepper — классика, встроенная в Arduino IDE, позволяет выполнять базовый шаг и управление скоростью вращения.
AccelStepper — гораздо более полнофункциональная библиотека, которая позволяет лучше управлять несколькими двигателями и обеспечивает правильное ускорение и замедление двигателя.
Intel C ++ MRAA Stepper — библиотека более низкого уровня для тех, кто хочет углубиться в управление необработанным шаговым двигателем C ++ с помощью Intel Edison.
Этих знаний должно быть достаточно, чтобы вы поняли как работать с шаговыми двигателями в электромеханическом мире, но это только начало.