Вентильный двигатель

Машины постоянного тока, как правило, имеют более высокие технико-экономические показатели (линейность характеристик, высокий КПД, малые габариты и пр.), чем машины переменного тока. Существенный недостаток — наличие щеточного аппарата, который снижает надежность, увеличивает момент инерции, создает радиопомехи, взрывоопасность и т.д. Поэтому, естественно, актуальна задача создания бесконтактного (бесколлекторного) двигателя постоянного тока.
Решение этой задачи оказалось возможным с появлением полупроводниковых приборов. В бесконтактном двигателе постоянного тока, именуемом вентильным двигателем постоянного тока , щеточный аппарат заменен полупроводниковым коммутатором, якорь неподвижен, ротор представляет собой постоянный магнит.
Принцип работы вентильного двигателя
 Под вентильным двигателем понимают систему регулируемого электропривода, состоящую из электродвигателя переменного тока, конструктивно подобного синхронной машине, вентильного преобразователя и устройств управления, обеспечивающих коммутацию цепей обмоток электродвигателя в зависимости от положения ротора двигателя. В этом смысле вентильный двигатель подобен двигателю постоянного тока, в котором посредством коллекторного коммутатора подключается тот виток обмотки якоря, который находится под полюсами возбуждения.
Под вентильным двигателем понимают систему регулируемого электропривода, состоящую из электродвигателя переменного тока, конструктивно подобного синхронной машине, вентильного преобразователя и устройств управления, обеспечивающих коммутацию цепей обмоток электродвигателя в зависимости от положения ротора двигателя. В этом смысле вентильный двигатель подобен двигателю постоянного тока, в котором посредством коллекторного коммутатора подключается тот виток обмотки якоря, который находится под полюсами возбуждения.
Вентильный двигатель постоянного тока представляет собой сложное электромеханическое устройство, в котором сочетаются простейшая электрическая машина и электронная система управления.
Двигателям постоянного тока присущи серьезные недостатки, обусловленные, главным образом, наличием щеточно-коллекторного аппарата:
1. Недостаточная надежность коллекторного аппарата, необходимость его периодического обслуживания.
2. Ограниченные величины напряжения на якоре и, следовательно, мощности двигателей постоянного тока, что ограничивает их применение для высокоскоростных приводов большой мощности.
3. Ограниченная перегрузочная способность двигателей постоянного тока, ограничение темпа изменения тока якоря, что существенно для высокодинамичных электроприводов.
В вентильном двигателе указанные недостатки не проявляются, поскольку здесь щеточно-коллекторный коммутатор заменен бесконтактным коммутатором, выполненным на тиристорах (для приводов большой мощности) или на транзисторах (для приводов мощностью до 200кВт). Исходя из этого, вентильный двигатель, который конструктивно выполняется на базе синхронной машины, часто называют бесконтактным двигателем постоянного тока.
По управляемости вентильный двигатель также подобен двигателю постоянного тока — его скорость регулируется изменением величины подводимого постоянного напряжения. Благодаря своим хорошим регулировочным качествам вентильные двигатели получили широкое применение для привода различных роботов, металлорежущих станков, промышленных машин и механизмов.
Электропривод по системе транзисторный коммутатор-вентильный двигатель с постоянными магнитами
Вентильный двигатель рассматриваемого типа выполнен на базе трехфазной синхронной машины с постоянными магнитами на роторе. Трехфазные обмотки статора питаются постоянным током, подаваемым поочередно в две последовательно соединенные фазные обмотки. Переключение обмоток производится транзисторным коммутатором, выполненным по трехфазной мостовой схеме. Транзисторные ключи открываются и закрываются в зависимости от положения ротора двигателя. Схема вентильного двигателя представлена на рис.1.
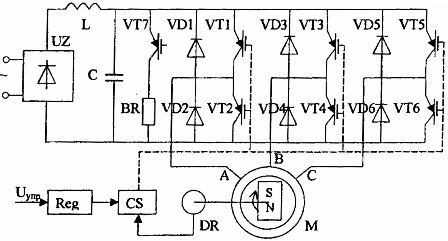
Рис.1. Схема вентильного двигателя с транзисторным коммутатором
Момент, создаваемый двигателем, определяется взаимодействием двух потоков:
• статора, создаваемого током в обмотках статора,
• ротора, создаваемого высокоэнергетическими постоянными магнитами (на основе сплавов самарий-кобальт и других).
где: θ — пространственный угол между векторами потоков статора и ротора; рп — число пар полюсов.
Магнитный поток статора стремится повернуть ротор с постоянными магнитами, так, чтобы поток ротора совпал по направлению с потоком статора (вспомним магнитную стрелку, компаса).
Наибольший момент, создаваемый на валу ротора, будет при угле между векторами потоков равным π/2 и будет уменьшаться до нуля по мере сближения векторов потоков. Эта зависимость показана на рис.2.
Рассмотрим пространственную диаграмму векторов потоков, соответствующую двигательному режиму (при числе пар полюсов pn=1). Предположим, что в данный момент включены транзисторы VT3 и VT2, (см. схему рис.1). Тогда ток проходит через обмотку фазы В и в обратном направлении через обмотку фазы А. Результирующий вектор м.д.с. статора будет занимать в пространстве положение F3 (см.рис.3).
Если ротор занимает в этот момент положение, показанное на рис.4., то двигатель будет развивать в соответствии с 1 максимальный момент, под действием которого ротор будет поворачиваться по часовой стрелке. По мере уменьшения угла θ момент будет уменьшаться. Когда ротор повернется на 30° необходимо в соответствии с графиком на рис.2. переключить ток в фазах двигателя, так, чтобы результирующий вектор м.д.с. статора занял положение F4 (см. рис.3). Для этого нужно отключить транзистор VT3 и включить транзистор VT5.
Переключение фаз выполняет транзисторный коммутатор VT1-VT6, управляемый от датчика положения ротора DR; при этом угол θ поддерживается в пределах 90°±30°, что соответствует максимальному значению момента с наименьшими пульсациями. При рn=1 за один оборот ротора должно быть произведено шесть переключений, благодаря которым м.д.с. статора совершит полный оборот (см. рис.3). При числе пар полюсов больше единицы поворот вектора м.д.с. статора, а, следовательно, и ротора, составит 360/рn градусов.
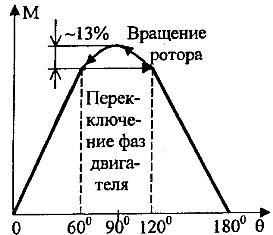
Рис.2. Зависимость момента двигателя от угла между векторами потоков статора и ротора (при рn=1)
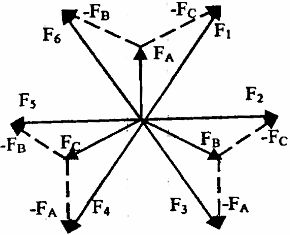
Рис.3. Пространственная диаграмма м.д.с. статора при переключении фаз вентильного двигателя
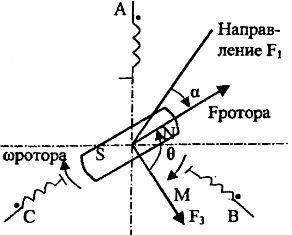
Рис.4. Пространственная диаграмма потоков в двигательном режиме
Регулирование величины момента производится изменением величины м.д.с. статора, т.е. изменением средней величины тока в обмотках статора

где: R1 — сопротивление обмотки статора.
Поскольку поток двигателя постоянен, то э.д.с. Ея, наводимая в двух последовательно включенных обмотках статора будет пропорциональна скорости ротора. Уравнение электрического равновесия для цепей статора будет

При отключении ключей ток в обмотках статора мгновенно не исчезает, а замыкается через обратные диоды и фильтровый конденсатор С.
Следовательно, регулируя напряжение питания двигателя U1, можно регулировать величину тока статора и момента двигателя

Нетрудно заметить, что полученные выражения подобны аналогичным выражениям для двигателя постоянного тока, вследствие чего механические характеристики вентильного двигателя в данной схеме подобны характеристикам двигателя постоянного тока независимого возбуждения при Ф=const.
Изменение напряжения питания вентильного двигателя в рассматриваемой схеме производится методом широтно-импульсного регулирования. Изменяя скважность импульсов транзисторов VT1-VT6 в периоды их включенного состояния, можно регулировать среднюю величину напряжения, подаваемого на обмотки статора двигателя.
Для осуществления режима торможения алгоритм работы транзисторного коммутатора должен быть изменен таким образом, чтобы вектор м.д.с. статора отставал от вектора потока ротора. Тогда момент двигателя станет отрицательным. Поскольку на входе преобразователя установлен неуправляемый выпрямитель, то рекуперация энергии торможения в данной схеме невозможна.
При торможении происходит подзаряд конденсатора фильтра С. Ограничение напряжения на конденсаторах осуществляется путем подключения разрядного сопротивления через транзистор VT7. Таким образом, энергия торможения рассеивается в разрядном сопротивлении.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Элементы теории вентильного привода
Определение вентильного двигателя
Обозначение в зарубежной литературе
Конструкция
Статор
Ротор
В зависимости от количества магнитов, расположенных в поперечном сечении ротора двигатель будет иметь то или иное количество полюсов.
В погружных вентильных электродвигателях используемых в нефтяной отрасли ротор содержит постоянные магниты. Как правило погружные ВД выпускаются 8-ми и 4-х полюсными.
При одной и той же частоте вращения электромагнитного поля статора, частота вращения вентильного электродвигателя с большим количеством пар полюсов будет меньше. Так, если скорость вращения 8-ми полюсного электродвигателя 1500 об/мин, то 4-х полюсный при той же частоте поля будет вращаться с частотой 3000 об/мин.
Принцип работы
Принцип работы вентильного электродвигателя
Здесь, одно из ключевых отличий вентильного (синхронного) и асинхронного двигателей.
Принцип работы асинхронного электродвигателя
Его ротор представляет собой обмотку с короткозамкнутыми витками , по виду напоминающую беличью клетку прутья которой — стержни с торцов соединенные кольцами.
Вращающееся электромагнитное поле статора наводит в роторе ЭДС, в стержнях ротора начинает течь ток, в результате чего возникает магнитное поле, которое и заставляет вращаться ротор вслед за магнитным полем, создаваемым статором. Именно то, что поле статора движется относительно ротора является условием возникновения электромагнитного поля в роторе. Если ротор заставить вращаться с той же скоростью, что и магнитное поле, создаваемое статором, то ЭДС в роторе наводится не будет! Таким образом скорость вращения ротора асинхронного двигателя всегда меньше скорости вращения поля.
Синхронный же двигатель не требует возбуждения ЭДС ротора от магнитного поля, создаваемого статором, магнитное поле здесь уже присутствует без его участия. Поэтому ротор синхронного электродвигателе вращается строго с частотой поля, создаваемого обмотками статора. Если установить частоту вращения синхронного двигателя равной 3000 об/мин, то это значит, что и магнитное поле двигателя, создаваемого обмотками статора равна 3000 об/мин. Частота вращения асинхронного двигателя в тех же условиях будет 2910 об/мин.
Система управления вентильным электродвигателем
Инвертором в данном случае называют электронную систему, осуществляющую подачу напряжения, частота которого не зависит от частоты питающего напряжения на обмотки электродвигателя.
Инвертором оснащаются не только синхронные (вентильные) электродвигатели, но асинхронные — там где требуется регулирование частоты вращения.
Существуют два основных подхода (принципа) в управлении вентильными электродвигателями:
- 1. Управления коммутацией (6-ти пульсное управление);
- 2. Векторное управление.
Управление коммутацией
И еще раз обратим ваше внимание! Не частота вращения ротора изменяется от частоты вращения поля, а поле подстраивается под частоту вращения ротора. Инвертор регулирует частоту вращения ротора изменяя ток и/или напряжение коммутируемое к обмоткам.
Определение положения ротора
Для определения положения ротора существуют различные методы:
- при помощи датчиков (например датчика Холла);
- бездатчиковый.
В погружных вентильных электродвигателях используется бездатчиковый метод определения положения ротора, т.к. применение датчиков в данном случае невозможно в силу специфики эксплуатации.
В бездатчиковом методе при вращении двигателя определение положение ротора осуществляется по значению ЭДС, наводимой в свободной фазе (к которой в данной момент не подводится питающее напряжение) обмотки статора. При движении ротора ЭДС в свободной фазе меняется и переход ее через 0 является «отметкой» положения ротора.
При таком методе управления в обмотках статора течет ток по форме близкий к трапецеидальному.
Данный способ управления характеризует простота и надежность, что позволяет управлять вентильным электродвигателем не только на коротких расстояниях, но и на длинных линиях — сотни метров и даже километры, что актуально для нефтяного погружного оборудования.
Векторное управление
Метод позволяет очень точно управлять электродвигателем. Метод наиболее ресурсоемкий в плане математических вычислений, однако развитие микропроцессорной техники позволяет компенсировать это. Применение его на коротких линиях очень эффективно, однако использование на длинных линиях ставит перед разработчиками множество преград, решение которых — нетривиальная задача.
Вентильный двигатель: конструкция, принцип работы, классификация
Постоянное совершенствование технологий и развитие точного электрооборудования приводит к созданию новых и преобразованию старых устройств. Такому совершенствованию подвергаются и электрические машины, которые неоднократно преобразовывались для получения точного позиционирования. При массовом внедрении полупроводниковых приборов появилась возможность заменить классические щетки на p-n переходы, в результате чего был создан вентильный двигатель.
Конструкция и принцип работы
Конструктивно вентильный агрегат представляет собой разновидность синхронного двигателя.
В его состав входят:
- Ротор, как правило, из магнитного материала, реагирующий на воздействие электромагнитного поля.
- Статор, включающий в себя фазы обмоток, намотанные в катушки станину и диэлектрическую прокладку.
- Измерительные датчики (чаще всего Холла), позволяющие определить положение вращения вала.
- Микропроцессорный блок, формирующий импульсы, их форму, задающие частоту вращения ротора, сравнивающий показания датчиков и подаваемого переменного тока на фазные обмотки.
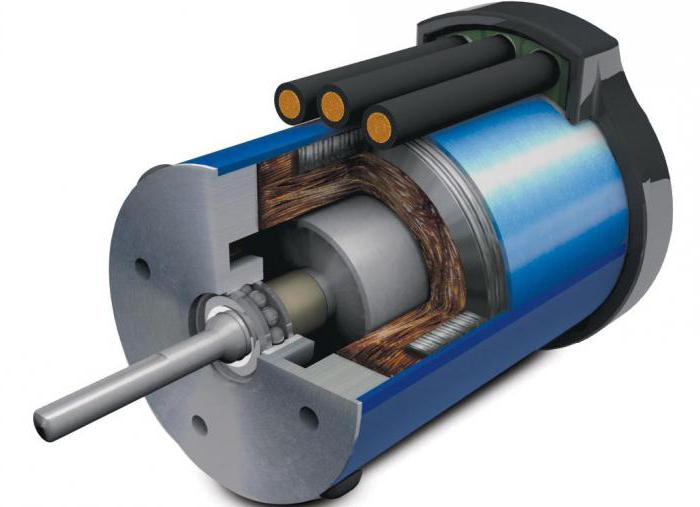
Пример конструкции вентильного двигателя приведен на рисунке ниже:
 Рис. 1. Конструкция вентильного двигателя
Рис. 1. Конструкция вентильного двигателя
Принцип работы вентильного двигателя заключается в четком позиционировании постоянных магнитов на роторе по отношению к формируемому пику электромагнитного импульса на фазных электрических обмотках. При движении магнитов датчики воспринимают информацию об их положении в пространстве и меняют пропускную способность реактивных вентильных преобразователей, что позволяет валу вращаться дальше. Таким образом, управление вращением осуществляется без использования скользящего контакта, поэтому данная категория электрических машин относится к категории бесколлекторных электродвигателей.
Статор
Конструктивно статор мало чем отличается от классических моделей синхронных и асинхронных двигателей. Это металлический цельнолитой или наборной магнитопровод, в пазах которого укладываются фазные провода. Количество обмоток якоря определяется числом подключаемых фаз и периодичностью их чередования. Чем чаще уложены обмотки статора, тем точнее контролируется вращение вентильного электродвигателя.
Полюса статора также могут характеризоваться смещением на строго определенный угол, как и его обмотки. По количеству фаз коммутации вентильные двигатели бывают двух-, трех-, четырех- и шестифазными.
Ротор
В зависимости от конструкции ротора бесконтактные двигатели могут иметь внутрироторное и внешнероторное исполнение.
 Рис. 3. Внешнероторные и внутрироторные модели
Рис. 3. Внешнероторные и внутрироторные модели
Количество пар полюсов также может отличаться, но уже без каких-либо привязок к обмоткам, как правило, этот параметр варьируется от двух до шестнадцати с парным шагом.
В более старых моделях для бесколлекторных двигателей использовались постоянные магниты из ферритовых сплавов. Которые отличались доступностью и относительно более низкой себестоимостью, но имели слишком низкие показатели индукции. Однако с постепенным развитием технологий, на смену им пришли магнитные элементы из редкоземельных металлов. Этот вариант обладает более точным позиционированием, но и стоит он дороже.
 Рис. 4. Вентильный двигатель с внешним ротором
Рис. 4. Вентильный двигатель с внешним ротором
Датчик положения ротора
В синхронных электродвигателях датчик необходим для осуществления обратной связи с положением вала механического устройства. В зависимости от принципа действия могут применяться датчики:
- Фотоэлектрического принципа действия;
- Трансформаторного;
- Индуктивного;
- На эффекте Холла.
 Рис. 5. Датчик положения ротора
Рис. 5. Датчик положения ротора
Наиболее распространенными вариантами для практической реализации стали фотоэлектрические датчики и датчики с эффектом Холла. Они обладают большей точностью и меньше запаздывают при передаче данных в канале связи. Датчики привязываются к определенным маркерам на валу и реагируют на их прохождение.
Система управления
В состав блока управления, как правило, входит микроконтроллер и электронный ключ для подключения к двух- или трехфазным обмоткам двигателя. Микроконтроллер или микропроцессор необходим для обработки получаемых с датчиков сигналов и последующего преобразования синусоидальной коммутации в более удобную форму сигнала. Электрические преобразователи выполняется на базе полупроводниковых транзисторов, соединенных по мостовой схеме. Они производят широтно-импульсную модуляцию питающего напряжения в соответствии с заданным режимом работы.
 Рис. 6. Электронный ключ вентильного двигателя
Рис. 6. Электронный ключ вентильного двигателя
Классификация
По типу питания вентильные электрические машины подразделяются на электродвигатели постоянного и переменного тока.
По способу взаимодействия магнитного поля статора и ротора встречаются синхронные, асинхронные и индукторные аппараты.
Помимо этого, в зависимости от числа задействованных фаз они разделяются на:
- Однофазные – представляю собой наиболее простой вариант, где используется минимум линий передачи питающего напряжения от блока управления к его обмоткам. Однако в некоторых позиция существует трудность пуска такого вентильного двигателя под нагрузкой.
- Двухфазные – обладают хорошей связью между обмоткой и статором. Но выдают довольно сильные пульсации, которые могут привести к негативным последствиям в работе.
- Трехфазные – наиболее распространенные варианты, способные выдать плавный пуск и нормальный режим работы вентильного двигателя. Характеризуется четным количеством обмоток и хорошими тяговыми характеристиками. К его недостаткам относят лишь чрезмерный шум во время работы.
- Четырехфазные – характеризуются минимальными пульсациями низким пусковым моментом. Но, в сравнении с другими моделями, они имеют высокую себестоимость, из-за чего применяются редко.
 Рис. 7. Четырехфазный вентильный двигатель
Рис. 7. Четырехфазный вентильный двигатель
Технические характеристики
При выборе конкретной модели важно определить ее соответствие месту установки, поэтому важно обращать внимание на следующие характеристики вентильных двигателей:
- номинальное напряжение – определяет питающую величину, которая должна подаваться на вентильный двигатель для получения номинального усилия;
- потребляемая мощность – характеристика электродвигателя, показывающая величину мощности, расходуемую на работу устройства;
- КПД – показывает соотношение полезной работы, совершаемой вентильным двигателем к израсходованной мощности;
- мощность на валу – полезная работа электрической машины, совершаемая за счет тягового усилия;
- номинальная частота – определяет количество оборотов в минуту, которые вентильный двигатель может совершать в номинальном режиме работы;
- диапазон регулировки частоты – показывает, в каких пределах можно изменять частоту оборотов вала для конкретной модели;
- номинальный крутящий момент – определяет усилие, создаваемое на валу вентильного двигателя при оптимальных параметрах работы, также в параметрах может регламентироваться пусковой и максимальный момент;
- коэффициент нагрузки – показывает, насколько снижается эффективность электрической машины, в зависимости от подъема над уровнем моря;
- габаритные размеры и масса вентильного двигателя.
Преимущества и недостатки
В сравнении с другими типами электрических машин, вентильный двигатель имеет ряд качественных отличий, дающих ему как выгодное, превосходство, так и определенные недостатки.
К преимуществам вентильных двигателей относят:
- Относительно небольшая величина магнитных потерь из-за отсутствия постоянно действующего поля, как в классических синхронных и асинхронных электродвигателях.
- Обеспечивает безопасное вращение даже с максимальной нагрузкой, в отличии от коллекторных электродвигателей.
- За счет встроенного преобразователя частоты коммутация вентильного преобразователя обеспечивает широкий спектр скоростей вращения, которые отличаются плавным переходом от одной к последующей.
- Хорошая динамика работы и точность позиционирования, способная создать конкуренцию шаговым двигателям.
- Относительно большая степень надежности и длительный срок эксплуатации без обслуживания за счет отсутствия скользящего контакта, в отличии от коллекторных двигателей.
- Может применяться во взрывоопасной среде, в отличии от электродвигателей постоянного и переменного тока со щетками.
К недостаткам вентильных агрегатов следует отнести их высокую себестоимость, наличие дополнительных элементов, усложняющих последующую эксплуатацию. Также существенным минусом считается сложность управления и задания логики перемещения рабочих органов трехфазных бесколлекторных двигателей в соответствии с меняющимися факторами производственного процесса.
Применение
Вентильные двигатели применяются во всех сферах, где требуется регулировать скорость вращения рабочего элемента. Такие синхронные приводы имеют точное позиционирование и применяются для компьютерной техники, устройств привода, винчестера, куллеров обдува и т.д.
 Рис. 8. Вентильный двигатель в компьютере
Рис. 8. Вентильный двигатель в компьютере
Помимо этого он используется в робототехнике, строительстве спутников, летательных аппаратов. Для бытовой техники, в устройствах автомобилестроения, в медицинской сфере. Также нашел широкое применение в станочном оборудовании, горнодобывающих машинах, используется в компрессорных установках и насосных станциях.
Вентильные двигатели. Виды и устройство. Работа и применение
Электродвигатели, работающие от постоянного тока, обычно обладают более высокими экономическими и техническими характеристиками, по сравнению с двигателями переменного тока. Единственным серьезным недостатком является наличие щеточного механизма, существенно понижающего надежность всей конструкции, повышающего инерционность ротора, взрывоопасность двигателя, а также создает радиопомехи.
Поэтому были созданы бесконтактные двигатели, работающие от постоянного тока, которые получили название вентильные двигатели. Создание такого нового устройства стало возможным, благодаря появлению полупроводников. Щеточный механизм в этой конструкции заменен коммутатором на основе полупроводниковых элементов. Якорь является неподвижным элементом, а на роторе закреплены постоянные магниты.
Устройство и работа
В целом вентильные двигатели включают в себя три подсистемы:
- Электронную.
- Механическую.
- Электрическую.
В результате получается мехатронное устройство, которое позволяет сделать корпус более компактным, избавиться от дополнительных деталей, лишних преобразователей, а соответственно сделать весь привод механизма более надежным.
Вентильный электродвигатель представляет собой измененный вариант коллекторного мотора постоянного тока. Мотор имеет индуктор, расположенный на роторе, обмотка якоря находится на статоре. Электричество подается управляющими командами на статорные обмотки, в зависимости от угла поворота ротора, который определяется встроенными датчиками Холла.

Ротор
Основу этого элемента составляет многополюсный постоянный магнит, который может иметь разное количество пар полюсов (от 2 до 8), с чередованием полюсов. Поначалу для производства роторов применяли ферритовые магниты невысокой стоимости. Однако ферритовые магниты имеют недостаток в том, что у них низкое значение магнитной индукции.
Современные конструкции роторов оснащают магнитами, изготовленными из редкоземельных элементов. Они дают возможность получить большую магнитную индукцию, а также сделать ротор более компактным.
Статор
Вентильный электродвигатель обычно имеет статор, состоящий из 3-х обмоток, соединенных «звездой» без отвода от средней точки, и внешне похожий на статор асинхронного мотора. Существуют вентильные двигатели со статором с большим количеством обмоток, а кроме схемы «звезды» их могут соединять «треугольником». Трехфазная структура обмоток считается наиболее эффективной при наименьшем количестве обмоток.
Если сравнивать две рассмотренные схемы соединения, то схема «звезды» предполагает больший момент вращения и меньшие показатели противо-ЭДС, в отличие от схемы «треугольника». Поэтому «звезду» чаще всего применяют для получения больших крутящих моментов, а «треугольник» — больших скоростей вращения.
Датчики положения и термодатчик
Этот чувствительный элемент создает обратную связь, и определяет положение ротора. Такие датчики могут работать по разным принципам – эффекта Холла, фотоэлектрическому и т.д. Большое распространение получили фотоэлектрические и датчики Холла. Они не имеют инерционности и дают возможность работы без запаздывания при определении положения ротора.
Фотоэлектрический датчик в его стандартном виде имеет три стационарных фотоприемника. Они по очереди закрываются шторкой, которая крутится синхронно ротору. Двоичный код, поступающий от датчиков, фиксирует шесть разных положений ротора. Управляющее устройство преобразует сигналы датчиков в управляющие импульсы напряжений, которые в свою очередь управляют полупроводниковыми ключами.
В каждый рабочий такт мотора включены два силовых ключа, и к электроэнергии подключены две обмотки из трех. Якорные обмотки расположены со сдвигом 120 градусов, и соединены между собой так, что при управлении силовыми ключами образуется вращающееся магнитное поле.
Дополнительно в вентильном двигателе могут иметься термодатчик, тормозной механизм. Тахогенератор используется в случае работы мотора в режиме стабилизации скорости с большой точностью.
Термодатчик служит для предохранения обмоток от перегрева, и включает в себя несколько позисторов, соединенных друг с другом между собой последовательно. Позисторы – резисторы, сопротивление которых зависит от температуры, чем больше температура, тем выше их сопротивление.
Принцип действия
Контроллер вентильного двигателя подключает обмотки статора так, что направление магнитного поля статора всегда перпендикулярно направлению поля ротора. Благодаря широтно-импульсной модуляции контроллер управляет током, который проходит по обмоткам. В результате создается момент вращения ротора, который регулируется.
Виды
Вентильные двигатели бывают постоянного и переменного тока. Кроме того, их разделяют на виды по числу фаз:
- Однофазные . Это наиболее простая конструкция вентильных двигателей с минимальным числом связей между электронной системой и мотором. К недостаткам однофазных двигателей относятся большие пульсации, невозможность пуска при некоторых положениях ротора. Однофазные моторы широко используются в механизмах, где необходима высокая скорость работы.
- Двухфазные . Такие вентильные двигатели работают в механизмах, где обязательно наличие связи обмотки и статора. К недостаткам можно отнести большой момент вращения и сильные пульсации, способные привести к отрицательным последствиям.
- Трехфазные . Эта дисковая конструкция мотора применяется для создания момента вращения, не применяя для этого большое число фаз. Этот вид моторов используется во многих отраслях промышленности, а также в бытовых условиях. Это наиболее распространенная конструкция, по сравнению с другими. Трехфазные двигатели вентильного типа, имеющие четное количество полюсов, стали хорошим вариантом для устройств, где требуется сочетание небольшой скорости и высокой мощности. Недостатками 3-фазных вентильных моторов является высокий уровень шума.
- 4-фазные . У таких двигателей значительно уменьшен момент вращения и пульсаций. Используются они достаточно редко, так как они имеют высокую стоимость.
Вентильные двигатели применяются во многих областях производства, например, на буровых установках, в системах охлаждения на химических заводах, на нефтяных скважинах.
Вентильный электродвигатель
Вентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что контроллер такого двигателя обычно питается от постоянного напряжения.
Содержание
Описание ВД
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчиком положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
Статор

Статор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты из редкоземельных сплавов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
В двигателях большой мощности вместо постоянного магнита на роторе используется электромагнит. Напряжение питания к нему подаётся через щётки и контактные кольца установленные на роторе. Так устроен автомобильный генератор.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке. Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающееся магнитное поле.
Система управления ВД
Система управления содержит силовые ключи, часто тиристоры или силовые транзисторы с изолированным затвором. Из них собирается инвертор напряжения или инвертор тока. Система управления ключами обычно реализуется на основе использования микроконтроллера. Наличия микропроцессора требует большое количество вычислительных операций по управлению двигателем.
Принцип работы ВД
Принцип работы ВД, основан на том что контроллер ВД так коммутирует обмотки статора чтобы вектор магнитного поля статора всегда был сдвинут на угол близкий к 90° или −90° относительно вектора магнитного поля ротора. C помощью ШИМ модуляции контроллер управляет током протекающим через обмотки ВД и значит величиной вектора магнитного поля статора и таким образом регулируется момент действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Внимание ! Градусы ЭЛЕКТРИЧЕСКИЕ. Они меньше геометрических градусов в число пар полюсов ротора. Например в ВД с ротором имеющим 3 пары полюсов оптимальный угол между векторами будет 90°/3 = 30°
Так как фаз коммутации обмоток всего 6 то вектор статора может перемещаться скачками по 60° — значит реальный угол между векторами будет не 90°, а будет меняться от 60° до 120° при вращении ротора ВД.
Коммутация производится так, что поток возбуждения ротора — Ф0 поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Управление двигателем
Контроллер ВД регулирует момент действующий на ротор меняя величину ШИМ.
В отличие от щёточного электродвигателя постоянного тока, коммутация в ВД осуществляется и контролируется с помощью электроники.
Распространены системы управления, реализующие алгоритмы широтно-импульсного регулирования и широтно-импульсной модуляции при управлении ВД.
Система, обеспечивающая самый широкий диапазон регулирования скорости — у двигателей с векторным управлением. С помощью преобразователя частоты осуществляется регулирование скорости двигателя и поддержание потокосцепления в машине на заданном уровне.
Особенность регулирования электропривода с векторным управлением — контролируемые координаты, измеренные в неподвижной системе координат преобразуются к вращающейся системе, из них выделяется постоянное значение, пропорциональное составляющим векторов контролируемых параметров, по которым осуществляется формирование управляющих воздействий, далее обратный переход.
Недостатком этих систем является сложность управляющих и функциональных устройств для широкого диапазона регулирования скорости.
Достоинства и недостатки ВД
В последнее время, этот тип двигателей быстро приобретает популярность, проникая во многие отрасли промышленности. Находит применение в различных сферах использования: от бытовых приборов до рельсового транспорта.
ВД с электронными системами управления часто объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
- Высокое быстродействие и динамика, точность позиционирования
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД более 90 % и соsφ более 0,95)
- Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
- Низкий перегрев электродвигателя, при работе в режимах с возможными перегрузками
- Относительно сложная система управления двигателем
- Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора
См. также
- Электродвигатель постоянного тока
- УКД
Ссылки
- http://www.gaw.ru/html.cgi/txt/app/micros/avr/AVR440.htm AVR440: Управление двухфазным бесколлекторным электродвигателем постоянного тока без датчиков
- http://www.unilib.neva.ru/dl/059/CHAPTER5/Chapter5.html 5.4.Вентильные двигатели
Wikimedia Foundation . 2010 .
- Вентворт Миллер
- Вентиляторы бытовые
Смотреть что такое «Вентильный электродвигатель» в других словарях:
вентильный электродвигатель постоянного тока — Электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля. [ГОСТ 27471 87]… … Справочник технического переводчика
Вентильный реактивный электродвигатель — В этой статье слишком короткое вступление. Пожалуйста, дополните вводную секцию, кратко раскрывающую тему статьи и обобщающую её содержимое … Википедия
Электродвигатель постоянного тока — Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, ма … Википедия
Коллекторный электродвигатель — Коллекторный электродвигатель синхронная[1] электрическая машина, в которой датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство щёточно коллекторный узел … Википедия
Постоянного тока электродвигатель — Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока … Википедия
Бесколлекторный электродвигатель — Принцип работы трёхфазного вентильного двигателя Вентильный электродвигатель это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля… … Википедия
Шаговый электродвигатель — Шаговый электродвигатель это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные… … Википедия
Универсальный коллекторный двигатель — Схема одного из вариантов УКД. Допускается работа и от постоянного, и от переменного тока Универсальный коллекторный двигатель (УКД) разновидность коллекторной машины постоянного тока, которая может работать и на постоянном, и на переменном … Википедия
ДПТ — Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока … Википедия
Двигатель постоянного тока — Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором Двигатель постоянного тока электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока … Википедия
Вентильный двигатель: устройство и принцип работы. Синхронный и асинхронный двигатель
Перевод электродвигателей с коллекторного узла управления на полупроводниковые устройства контроля позволил оптимизировать силовые агрегаты. Модернизация затронула и мощностные параметры, и конструкционные характеристики. Наиболее выраженным отличием стало уменьшение габаритов, что позволило использовать такие агрегаты в небольших по размерам приборах и установках. Типичным примером реализации бесколлекторного привода является вентильный двигатель, работающий в условиях постоянного тока. Он обеспечивает существенные технико-экономические преимущества в процессе эксплуатации, но не избавлен и от недостатков.

Конструкция и устройство двигателя
Техническая инфраструктура формируется двумя сегментами – непосредственно механикой и управляющим комплексом. С точки зрения конструкционного устройства агрегат во многом похож на традиционное наполнение электромеханических роторных двигателей. Соответственно, в состав электромотора входят ротор, статор и обмотка. Причем статор представляет собой набор из отдельных изолированных листов, выполненных из стального сплава. В процессе работы они способствуют понижению вихревых токов. В нем как раз и находится обмотка, которая может иметь разное количество фаз. Начинка элемента образована стальным сердечником, а обмотка представляет собой медные волокна. Для защиты применяется корпус, на поверхности которого также предусматриваются средства физического крепления.
Что касается ротора, то он сформирован постоянными магнитами. В зависимости от модификации, он может иметь до шестнадцати пар чередующихся полюсов. Прежде для изготовления роторов применялись ферритовые магниты, что было обусловлено их ценовой доступностью. Сегодня же на первый план выходят эксплуатационные характеристики вентильного двигателя – в частности крутящий момент, который варьируется от 1 до 70 Нм. Пропускная же частота в среднем находится в пределах 2-4 тыс. оборотов. Для достижения таких показателей требуется магнит с высокой степенью индукции, поэтому производители перешли на использование редкоземельных сплавов. Такие магниты не просто дают более высокую производительность, но и обладают меньшими размерами. Отчасти и этот переход способствовал оптимизации габаритов вентильного электродвигателя. Отдельно стоит рассмотреть компоненты управляющего сегмента.
Система управления
Если электромеханическая часть состоит преимущественно из трех компонентов, в числе которых ротор, статор и несущая конструкция в виде корпуса, то управляющая инфраструктура более сегментирована – количество элементов может достигать нескольких десятков. Другое дело, что их можно поделить на виды. В единственном числе будет представлен только инвертор. Он отвечает за функции коммутации, осуществляя подключение и переключение фаз. Основные же задачи контроля с подачей сигналов выполняют датчики. Главным из них является детектор положения ротора. Кроме этого, в состав управляющего блока вводится и система регуляции сигналов. Это узел с ключами, посредством которого реализуется связь датчиков и электромеханической начинки.
Информацию о позиции ротора обрабатывает микропроцессор. Внешне интерфейс этого блока представляет собой панель управления. На приеме она работает с сигналами широтно-импульсной модуляции (ШИМ-сигнал). Если предусматривается подача низковольтных сигналов, то в управляющем блоке устанавливается и транзисторный мост. Он преобразует сигнал в силовое напряжение, которое в дальнейшем подается на электродвигатель. Наличие датчиков с системой обработки импульсов как раз и отличает управление вентильным двигателем от средств контроля щеточно-коллекторных агрегатов. Другое дело, что возможность внедрения электронной аппаратуры с датчиками допускается и в коллекторных машинах наряду с механическими системами управления.
Принцип работы
Вентильный электродвигатель в процессе работы создает индукцию магнитных полюсов через ротор. На фоне генерации электромагнитного воздействия формируется сопротивление. Иными словами, активизируется функция ротора, после чего он передает крутящий момент целевому агрегату. В условиях переменной скорости магнетизм может быть оптимизирован для более производительной работы с реверсом. Опять же, датчик положения ротора сообщает данные для регуляции в соответствии с фазами напряжения. Гибкость и оперативность настройки параметров ротора и количества фаз позволяет эффективнее регулировать работу механизма. Весь цикл демонстрирует процесс преобразования электроэнергии в физическую мощь (механическая энергия), которую вырабатывает генератор. Причем если резко отсоединить агрегат от сети, то преобразуемая в данный момент энергия будет возвращена статору.

Важным условием поддержания достаточной производительности является стабильность двигателя. Критерием оценки этой характеристики будет его плавность, достигаемая понижением пульсаций. Для этого нужно знать вектор вращения потока статора, чтобы он был синхронен с функцией ротора. Координация разных потоков вращения как раз и достигается взаимодействием датчиков и коммутатора, которым управляются вентильные двигатели. Принцип работы этой связки позволяет с высокой точностью определять, к какой фазе нужно подключать ротор, определяя также оси. В нужной последовательности панель управления через микропроцессор попеременно подключает и отключает разные фазы.
Особенности синхронных моделей
Вышеописанный принцип работы как раз иллюстрирует работу синхронного двигателя. То есть в нем реализуется взаимодействие полюсов индуктора и статорного магнитного поля. Но и в таких системах могут быть свои различия. Например, и синхронный, и асинхронный двигатель могут оснащаться электромагнитами. В случае с синхронными агрегатами такого типа ток будет направляться на ротор, минуя контакт щетка-кольцо. Постоянные же магниты применяются в двигателях, базирующихся на жестких дисках. Также существуют и обращенные конструкции. В них якорные потоки находятся на роторе, а индукция – на статоре.
Для включения синхронного двигателя требуется высокий разгон по частоте, чтобы появилась возможность подстройки вращения двух функциональных компонентов. В конструкциях, где индуктор находится на статоре, поле ротора остается неподвижным относительно якоря. И напротив, если устройство предполагает обратную конструкцию, то «ввод в синхронизацию» будет осуществляться через ожидание статора. Момент ожидания зависит от того, с какой нагрузкой работает вентильный двигатель, и какая частота является оптимальной для активизации его индуктора.

Особенности асинхронных агрегатов
В асинхронных двигателях ротор не вращается в противоположном направлении. Его нельзя назвать обратным синхронному агрегату с точки зрения взаимодействия магнитных потоков ротора и статора. И синхронный, и асинхронный двигатель предполагают следование одного поля за другим. Другое дело, что во втором случае ротор, к примеру, может быть «догоняющим». Он следует за генерацией индукционного момента.
В стандартной конструкции статор генерирует электромагнитное поле, заставляя через определенное время вращаться и ротор. Принципиальным отличием между двумя типами двигателей является и то, что индуктор не является генератором возбуждения магнитного поля ротора. Поэтому вентильный электродвигатель асинхронного типа может автономно заставлять вращаться ротор с определенной частотой от обмотки статора. Это вовсе не значит, что два механизма работают отдельно, но их функции не так тесно взаимосвязаны, как в случае с синхронными двигателями. Это же касается и скорости. Например, если в синхронном агрегате будет частота вращения на 3000 об./мин для индуктора и ротора, то асинхронный принцип работы для того же ротора может снизить эту величину до 2910 об./мин.
Вентильно-индукторный двигатель

Можно сказать, что все вентильные электромоторы являются индукторными. В той или иной степени принцип индукции закладывается в синхронный и асинхронный агрегаты. Но есть также модели, в которых индукция способствует самонамагничиванию. Иначе эту машину можно назвать самовозбуждающейся. В традиционном исполнении вентильно-индукторный двигатель этого типа имеет простую конструкцию, питается от однополярных импульсов тока и работает с теми же датчиками ротора. Однако из-за нюансов энергоснабжения его нельзя подключать напрямую к сети. В итоге требуется введение в инфраструктуру специальных преобразователей.
С другой стороны, в данной конструкции присутствуют практически все достоинства синхронных агрегатов. Самым явным из них является широкий спектр частот вращения. Например, вентильно-реактивный двигатель с возможностью самовозбуждения способен выдавать порядка 100 тыс. оборотов. Это уже быстроходные электродвигатели, для которых используются комплектующие высокой степени прочности.
Разновидности агрегатов по количеству фаз
Простейшее исполнение такого электродвигателя – это однофазные агрегаты, которые предусматривают минимальное количество контактов между электронной аппаратурой и механикой. Соответственно, отсюда вытекают и слабые места конструкции, среди которых ограничения в положении ротора и сильные пульсации. Двухфазные модели способны формировать воздушный зазор, а также при определенных условиях обеспечивать асимметрию полюсов. Опять же, такие машины грешат высокой степенью пульсации, однако их можно использовать в тех случаях, когда связка статора с обмоткой является обязательным условием. Трехфазный вентильный двигатель характеризуется сочетанием невысокой скорости, но хорошей силовой отдачей. Поэтому его чаще используют как в сборке бытовых приборов, так и в изготовлении промышленной техники. Также существуют четырех- и шестифазные модели вентильных электромоторов, но это уже сегменты специализированных установок, которые дорого стоят и обладают крупными габаритами.

Преимущества электродвигателей
Благодаря конструкционной оптимизации вентильная силовая техника обеспечивает множество эксплуатационных преимуществ. В их числе стоит отметить быстродействие, гибкость в настройке, точность определения позиции ротора (с помощью датчика), широкие возможности технической подстройки и т.д. При скромных энергозатратах можно получить высокую силовую отдачу. Что еще важно, вентильный электродвигатель задействует небольшой ресурс механического действия, а это благоприятно сказывается и на его сроке эксплуатации. Низкий уровень термического воздействия на элементную базу обуславливает отсутствие перегревов, поэтому детали лишь в редких случаях требуют замены по причине износа.
Недостатки электродвигателя
Специалисты отмечают два основных минуса таких электродвигателей. В первую очередь это сложность конструкции. Не механической части, а именно электронной основы, которая обеспечивает управление мотором. Применение микропроцессоров, датчиков, инверторов и сопутствующей электротехнической фурнитуры требует соответствующего подхода к обеспечению надежности работы компонентов системы. Таким образом, повышается и стоимость обслуживания техники. Вместе с этим, отмечается и дороговизна магнитов, на которых базируется вентильный двигатель даже в простых однофазных исполнениях. На практике пользователи стараются заменять недешевые элементы и расходники, вместе с этим упрощая и систему управления. Но такие меры сами по себе требуют определенных ресурсов, не говоря о том, что снижается эффективность двигателя.
Заключение

Концепция использования электроники в составе традиционных роторных двигателей не всегда оправдывается в процессе эксплуатации. Связано это со сферами применения такого оснащения. Чаще всего это традиционные области производства, где совсем не обязательно подключение электронных систем управления. Инновационная начинка заставляет пересматривать производственные циклы, точечно модернизируя технологические процессы. К тому же стоимость двигателя, которая варьируется от 15 до 20 тыс. руб., не добавляет привлекательности этой продукции. Обычные аналоги на контроллерах с электромеханическими реле обходятся дешевле, не говоря о том, что их легче интегрировать в процессе сборки продукции.
И все же появляются направления, в которых высоко ценится именно полупроводниковое управление с датчиками роторов. Как правило, это высокотехнологичное оборудование, выпуском которого занимаются крупные компании. Причем на выходе они предоставляют продукцию разного уровня, в том числе и для бытового применения.