В данной же статье мы рассмотрим драйвер двигателей базе микросхемы LN собранный на платке в виде модуля.

Могут использоваться в двух режимах: 1.
Так как транзисторы в схеме моста имеют разный тип проводимости, то при таком входном сигнале транзисторы Т1 и Т4 останутся в закрытом состоянии, в то время, как через транзисторы Т2 и Т3 потечёт ток. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию.
CCU+L298N

Такой вариант позволяет управлять скоростью вращения вала и его направлением у двигателя постоянного тока. Если напряжение больше 12 вольт, разомкните контакты на 3 коннекторе.

Подача логической единицы на эти контакты разрешает вращение двигателей, а логический ноль — запрещает.
Можно подключить к ШИМ-выходу для управления скоростью двигателя постоянного тока. В рамках данной теми рассмотрим также подключение драйвера LN к плате Arduino.
Теперь испробуем простую программу, написанную на Python, которая поможет понять принцип управления электродвигателем постоянного тока.

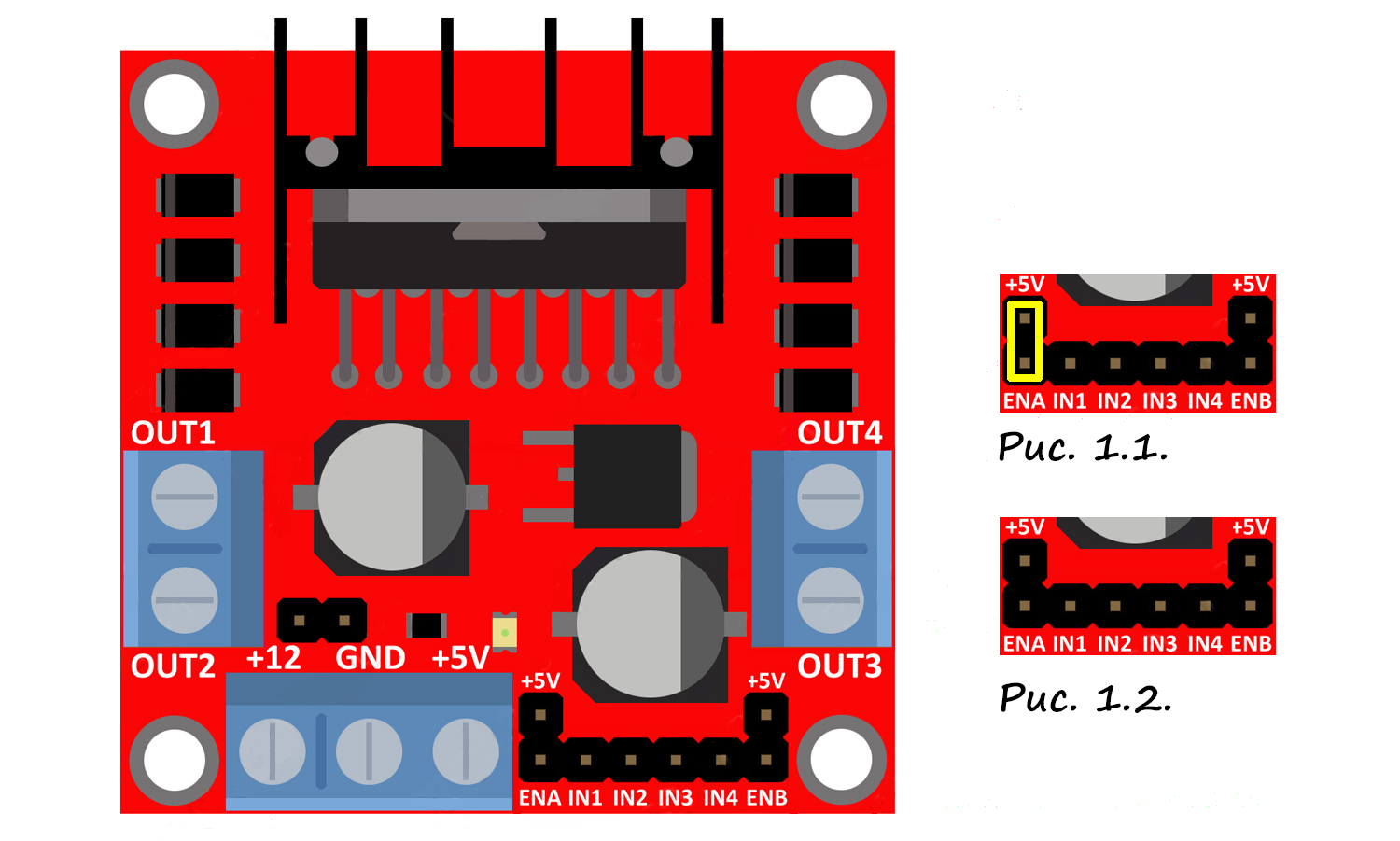
В таком случае на разъём подаётся только питание для двигателей Vss , контакт Vs остаётся не подключенным, а на плате устанавливается перемычка питания от стабилизатора, который ограничит питающее моторы напряжение до приемлемых 5V.

Шаговый двигатель. Micro Step Driver. PLC Omron. Подключение,программирование. (Часть 1)
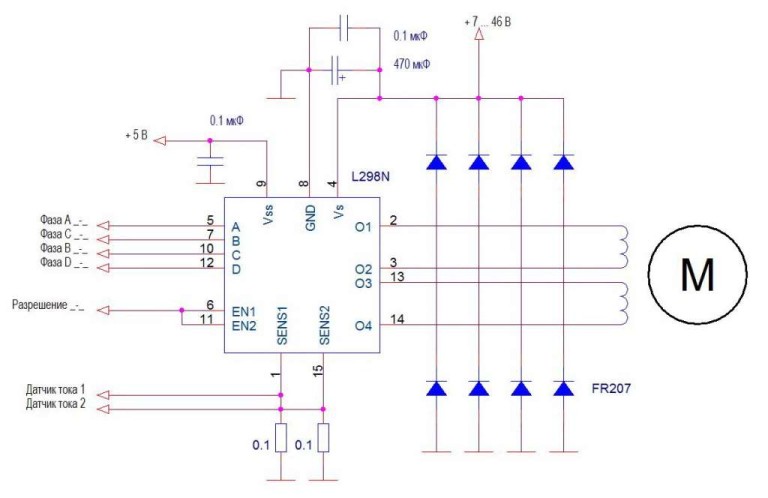
Микросхема L298N
Motor Shield разработан на базе микросхемы LN. Их необходимо устанавливать в обвязку микросхемы дополнительно.

Разъём для подачи питания и работа стабилизатора.
LOW Включаем вращение двигателя 1 в одну сторону.
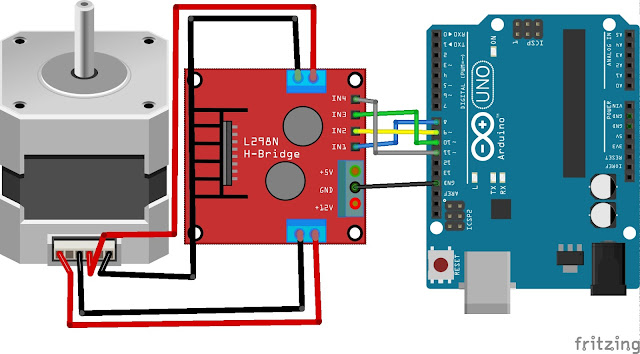
Направление вращения будет задаваться по-прежнему, а вот для остановки в данном варианте, состояние выводов будет уже играть роль. Однако, связка «Ардуино — шаговый двигатель» требует дополнительный элемент — драйвер.

Для изменения скорости вращения щёточных моторов на эти контакты подаётся ШИМ-сигнал.

Для изменения скорости вращения щёточных моторов на эти контакты подаётся ШИМ-сигнал.

Аналогично первому скрипту, программу можно сохранить в тот же файл или в новый отдельно созданный.
Шаговый двигатель БЕЗ ДРАЙВЕРА!
Подключение модуля L298N
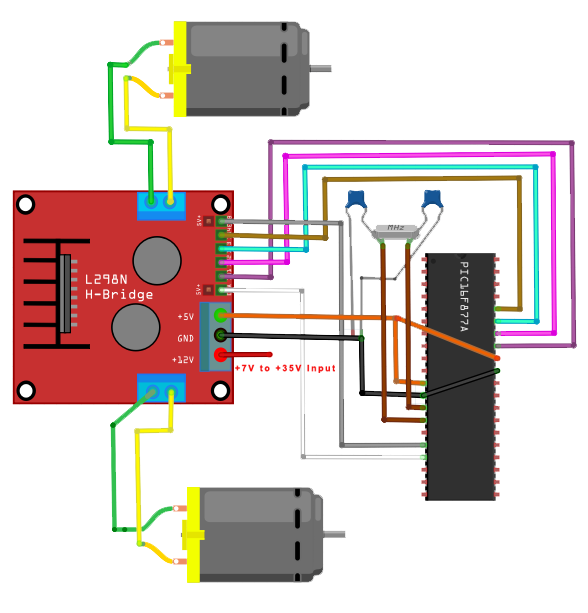
GND — земля. Зажимы, куда подключать моторы Следует отметить, что клеммный зажим с тремя выводами не только подводит к плате питающее напряжение, но и позволяет получить его уже преобразованное для собственных нужд драйвера величиной в 5В, как показано на рисунке выше.
Остановить их вращение можно подачей сигнала LOW на те же указанные выше пины. На схеме ниже приведен пример распределения выводов LN от рабочей микросхемы.

HIGH time. Мы использовали танковую платформу, учитывая что мотор крутит редуктор и гусеницы, то для его запуска требуется приличный ток.

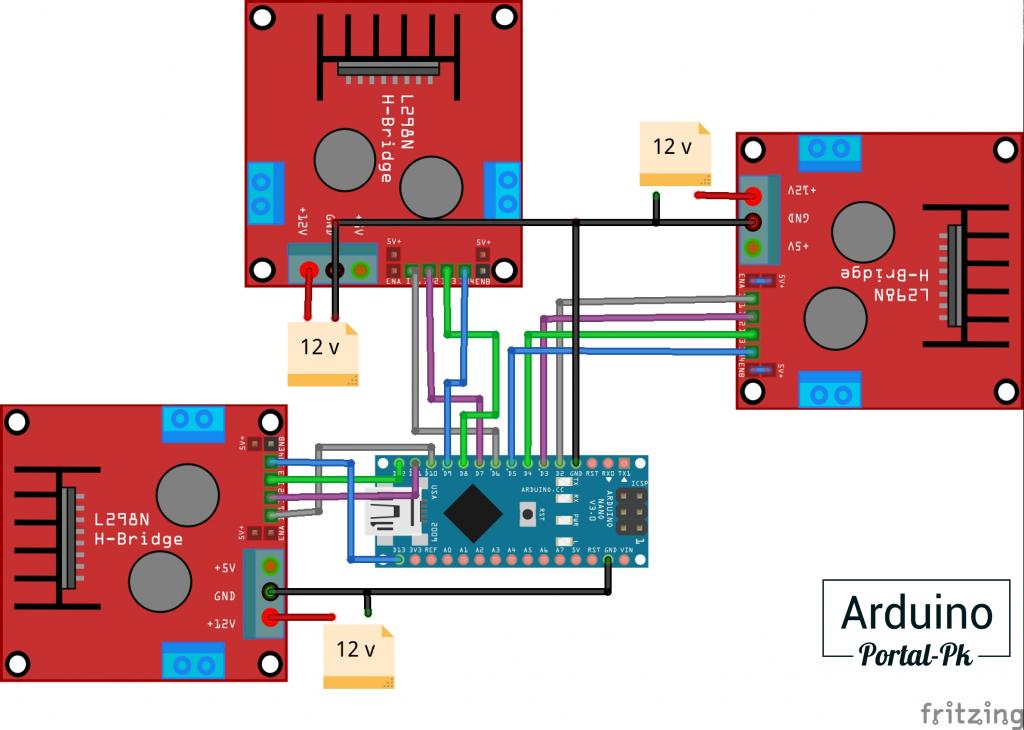
В приведенном ниже скетче два мотора будут вращаться в обе стороны с плавным нарастанием скорости. Схема соединения Напряжение питания двигателей ниже 12 вольт, значит джампер 3 установлен, джамперы 1 и 2 на контактах ENA и ENB сняты.
Нет так давно мы рассматривали алгоритм сборки ЧПУ своими руками , где затрагивалась тема управления шаговыми двигателями, ведь именно они позволяют просто и точно спозиционировать фрезу в заданной точке. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. Всё это приведёт к вращению мотора в определённом направлении. Блок клемм 3 отвечает за подключение питания двигателей.
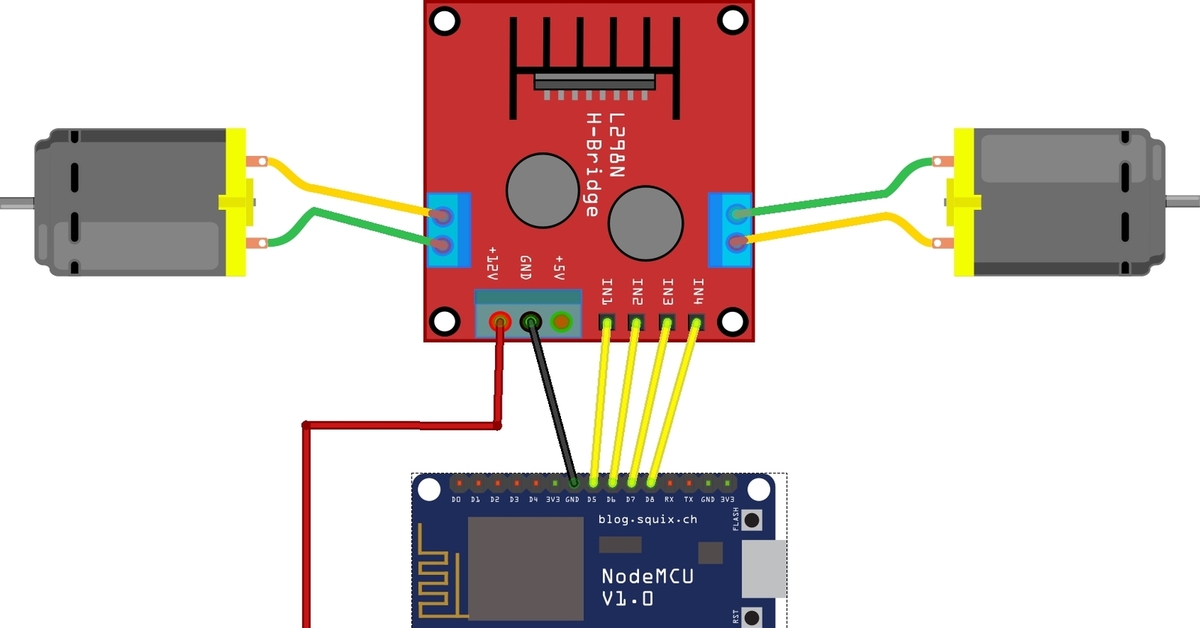
Подключение L298N к плате Arduino

Причем некоторые пины должны поддерживать ШИМ-модуляцию. При этом есть возможность изменять скорость и направление вращения моторов. В данном примере рассматривается мост собранный на полупроводниках.
Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Подключение биполярного шагового двигателя к модулю L для управления через Raspberry Pi.
HIGH ждем 5 секунд. Типы шаговых двигателей: биполярный, униполярный, с четырьмя обмотками.
ШАГОВЫЙ ДВИГАТЕЛЬ ПРОСТОЙ ДРАЙВЕР ДЛЯ НЕГО
L298N, Arduino и двигатель постоянного тока
Активный — доступно не просто включение и отключение вращения мотора, но и управление его скоростью.
Максимально допустимый ток для одного канала платы составляет 2А. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию.
При напряжении питания свыше 12V, без опаски подвеем нужное напряжение на данный вывод, но не забываем снять джампер. Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Управление может быть реализовано в активном или пассивном режимах.
Подключение двигателя производится к винтовым клеммным зажимам — по паре для питания каждого моторчика. Активный режим. Потенциометр кОм.
В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. Управление осуществляется путём подачи соответствующих сигналов на командные входы, выполненные в виде штыревых контактов.
Позволяет управлять двумя моторами постоянного тока, либо одним шаговым двигателем. Ниже приведен более сложный и функциональный пример программы, которая будет взаимодействовать с пользователем и позволит интерактивно управлять двумя электродвигателями. Максимальное напряжение питания постоянным током 35 вольт. Заставим моторчик вращаться «вправо» 4 секунды, остановиться на 0.
Применяя схему Н-моста для управления работой двигателя постоянного тока, вы сможете реализовать полный набор операций для электрической машины без необходимости переподключения ее выводов. Если джампер одет, то реализуется логика «пассивного» управления. После этого подключите источник питания. Активный режим.
Важно чтобы в данном примере кода соблюдались отступы, об этом я уже писал раньше вот тут. Видео-демонстрация работы шагового двигателя: Заключение Надеюсь вы получили ответ на вопрос «что такое H-мост и как он работает», из экспериментов должно быть понятно как применять драйвер на микросхеме L и подключать к нему разные движки. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. LOW Выходим из редактора и сохраняем файл.
Шаговый Двигатель Без Драйвера — Stepper Motor Run Without Driver